Tema 1: Análisis espectral de series temporales(1)

Ruido blanco
Una colección de variables aleatorias no correlacionadas, \(w_t\), con media 0 y variancia \(\sigma_w^2\).
Denotado por \(w_t \sim wn(0,\sigma_w^2)\).
Si una secuencia de variables es i.i.d., i.e. \(w_t \sim iid(0,\sigma_w^2)\), entonces \(w_t \sim wn(0,\sigma_w^2)\). ¡El inverso no es cierto!
Sin embargo, si un ruido blanco es Gaussiano, entonces \(w_t \overset{iid}{\sim} N(0,\sigma_w^2)\).
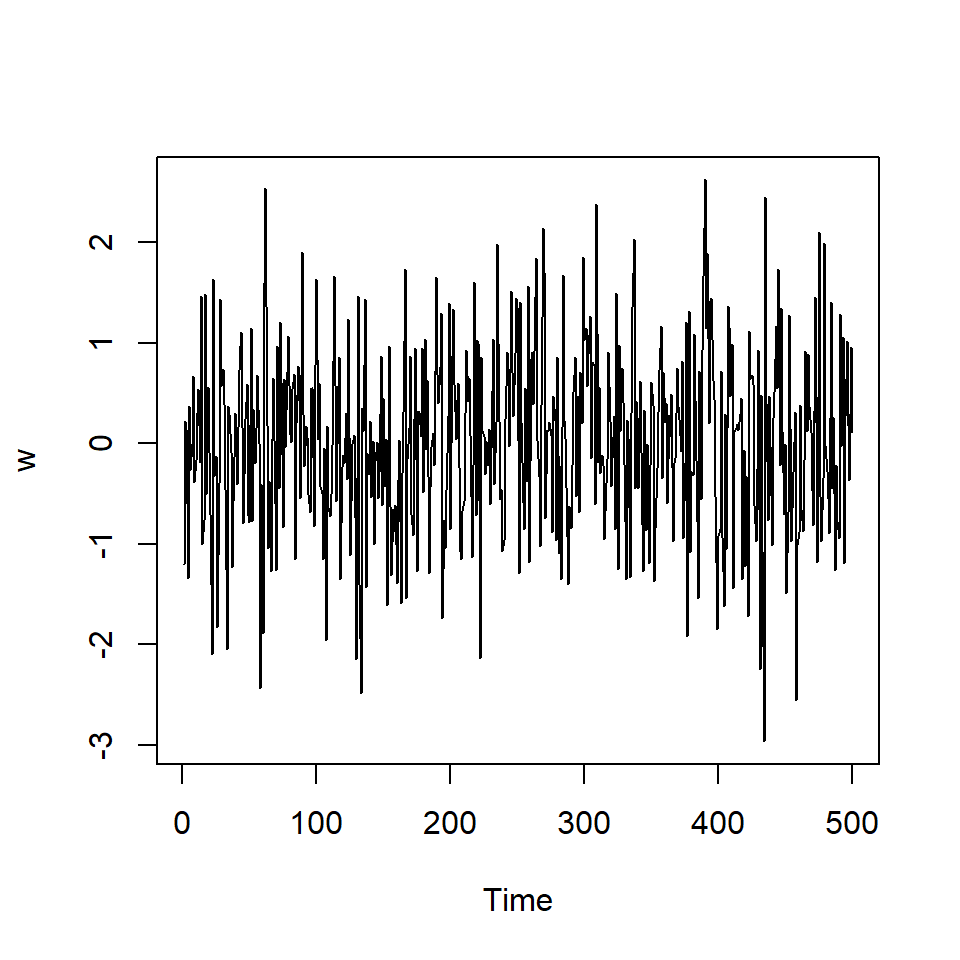
Simulación de una colección de \(w_t \sim N(0,1)\) con \(T=500\).
Ruido blanco
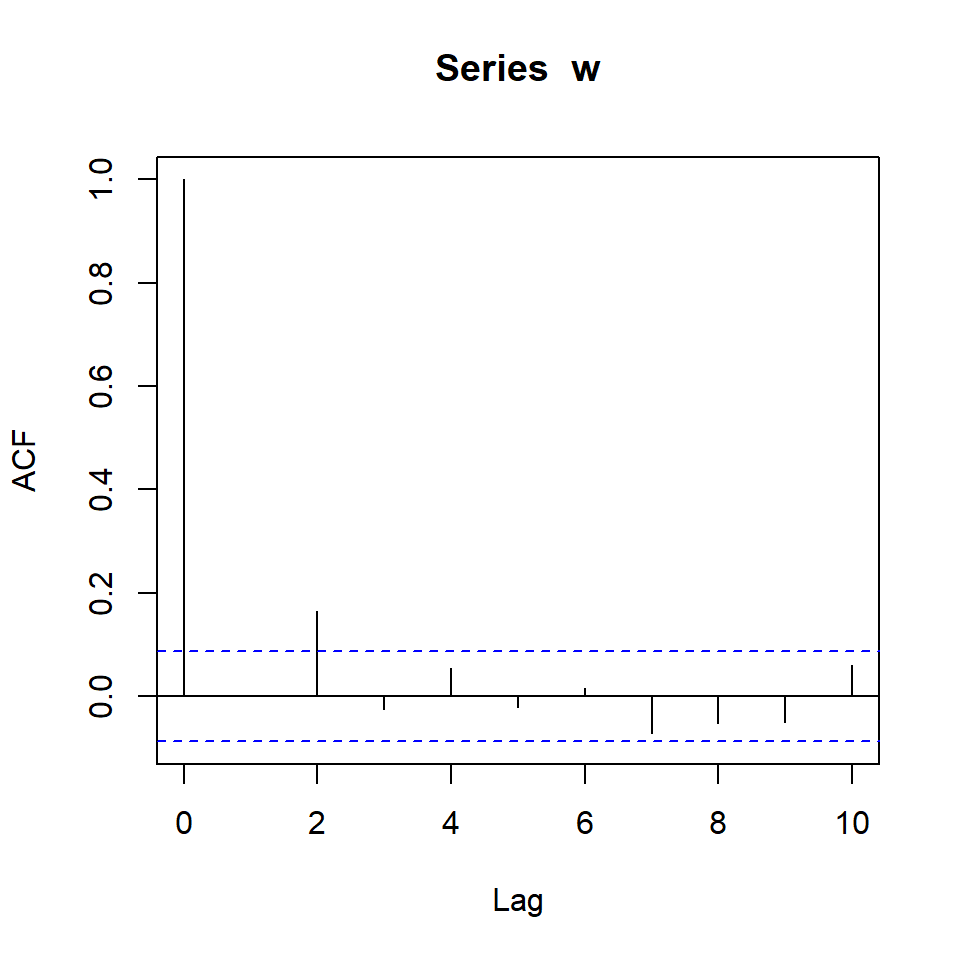
- Si \(w_t \sim wn(0,\sigma_w^2)\), la función de autocorrelación es
\[\rho_w(t,s)=\left\lbrace \begin{aligned} 1, & & t = s \\ 0, & & t \neq s, \end{aligned} \right.\]
o
\[\rho_w(h)=\left\lbrace \begin{aligned} 1, & & h = 0 \\ 0, & & h \neq 0, \end{aligned} \right.\]
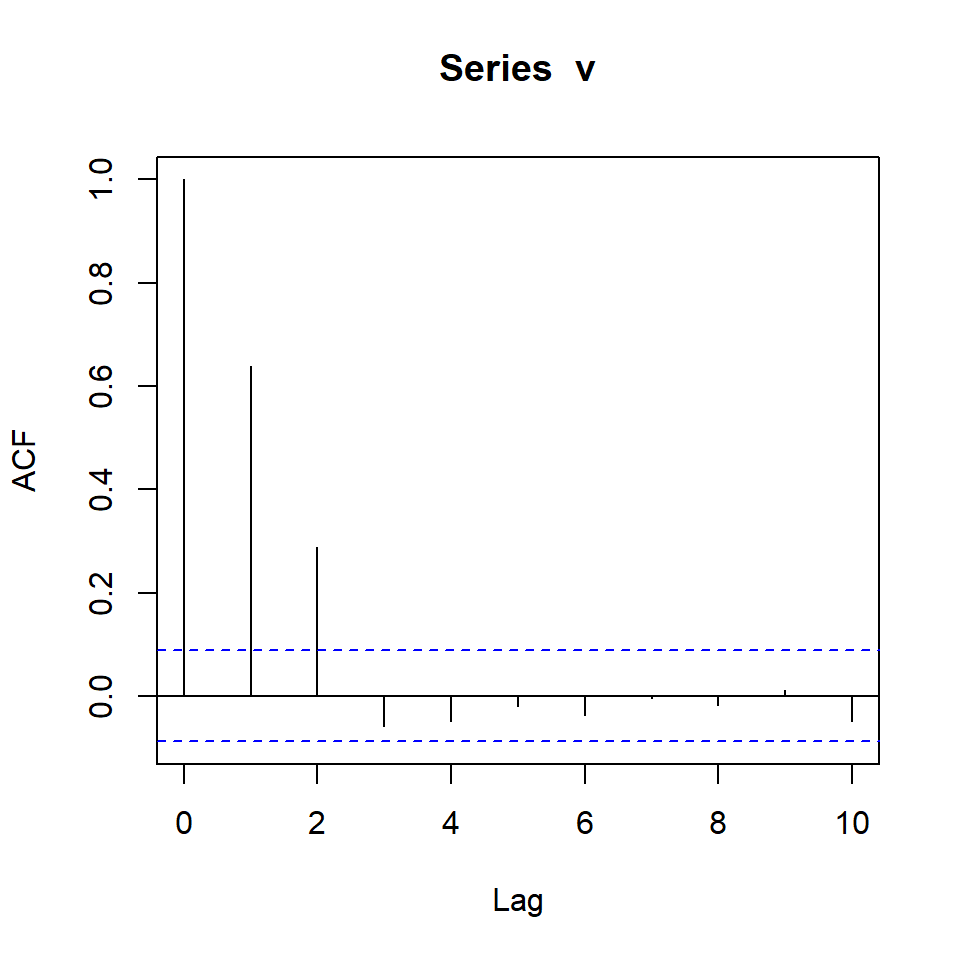
- Su función de autocorrelación es \[\rho_v(h)=\left\lbrace \begin{aligned} 1, & & h = 0 \\ \frac{2}{3}, & & |h| = 1 \\ \frac{1}{3}, & & |h| = 2 \\ 0, & & |h| > 2, \end{aligned} \right.\]
Ejemplo 1
m<-5 #la media del proceso
y1 <- arima.sim(n = 150, model = list(order = c(1,0,0),ar = c(0.8)),sd=3,rand.gen= rnorm) + m
ts.plot(y1)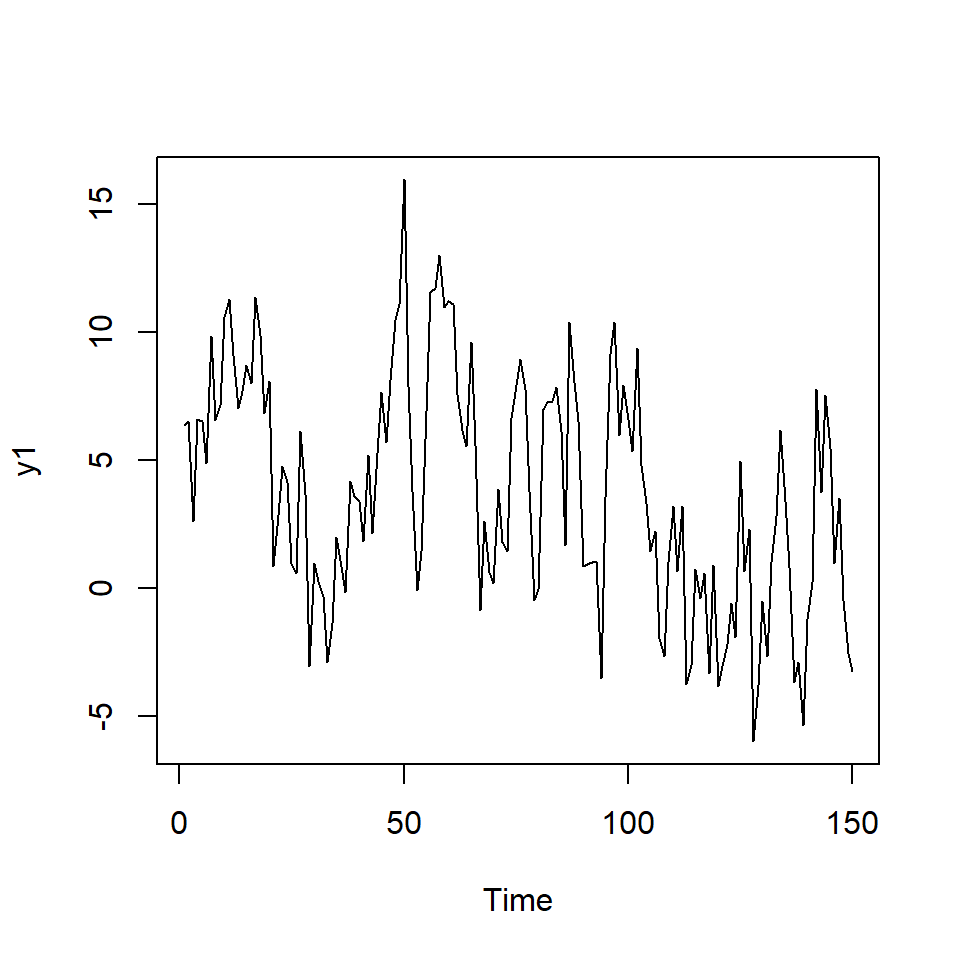
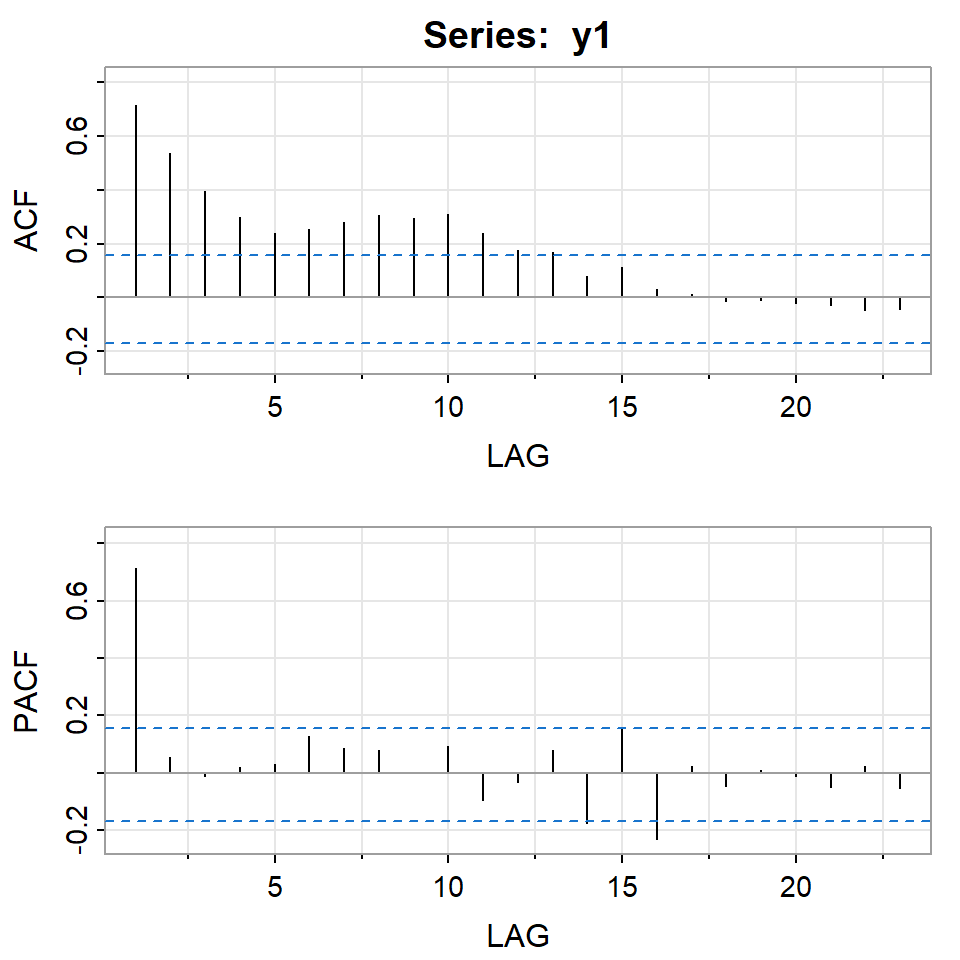
[,1] [,2] [,3] [,4] [,5] [,6] [,7] [,8] [,9] [,10] [,11] [,12] [,13]
ACF 0.71 0.54 0.39 0.30 0.24 0.25 0.28 0.31 0.29 0.31 0.24 0.18 0.17
PACF 0.71 0.05 -0.01 0.02 0.03 0.13 0.09 0.08 0.00 0.09 -0.10 -0.03 0.08
[,14] [,15] [,16] [,17] [,18] [,19] [,20] [,21] [,22] [,23]
ACF 0.08 0.11 0.03 0.01 -0.01 -0.01 -0.02 -0.03 -0.04 -0.04
PACF -0.17 0.15 -0.23 0.02 -0.05 0.01 -0.01 -0.05 0.02 -0.05Series: y1
ARIMA(1,0,0) with non-zero mean
Coefficients:
ar1 mean
0.7218 3.6802
s.e. 0.0565 0.8971
sigma^2 = 9.791: log likelihood = -383.31
AIC=772.62 AICc=772.79 BIC=781.65
Training set error measures:
ME RMSE MAE MPE MAPE MASE
Training set -0.01837014 3.108109 2.511776 62.62337 162.6081 0.9317537
ACF1
Training set -0.04000369Modelo lineal
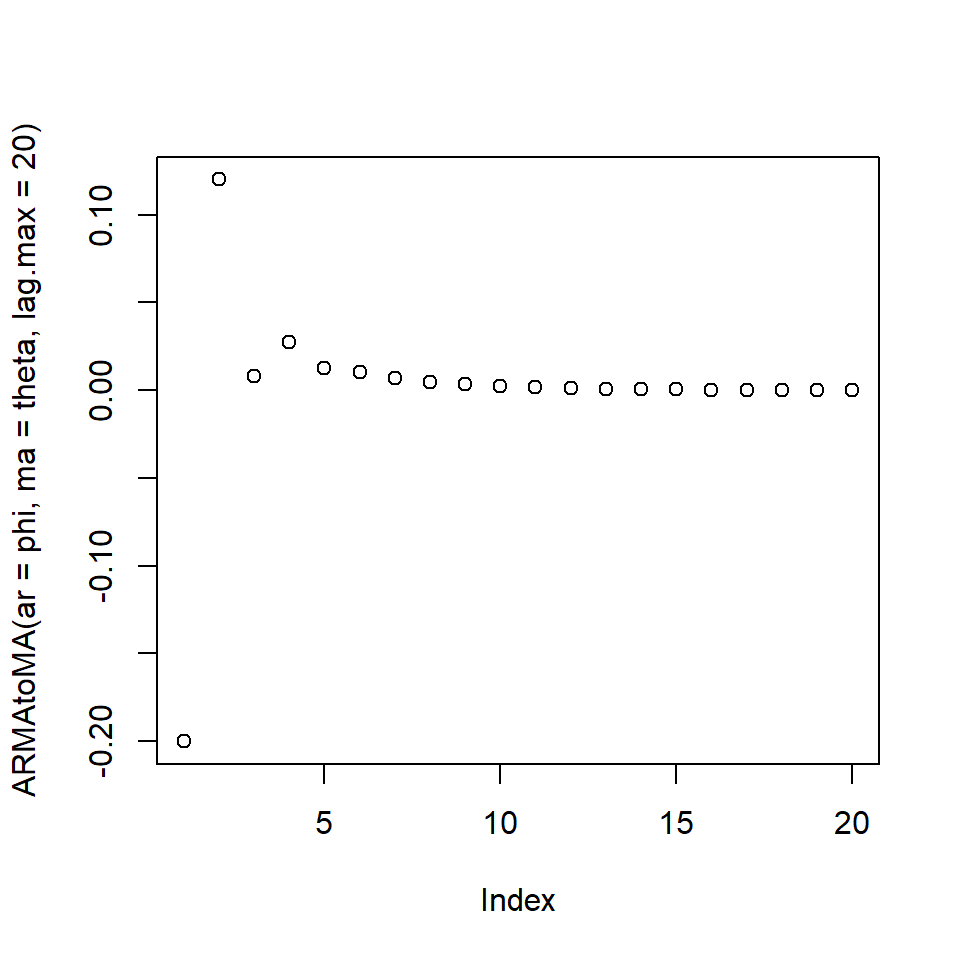
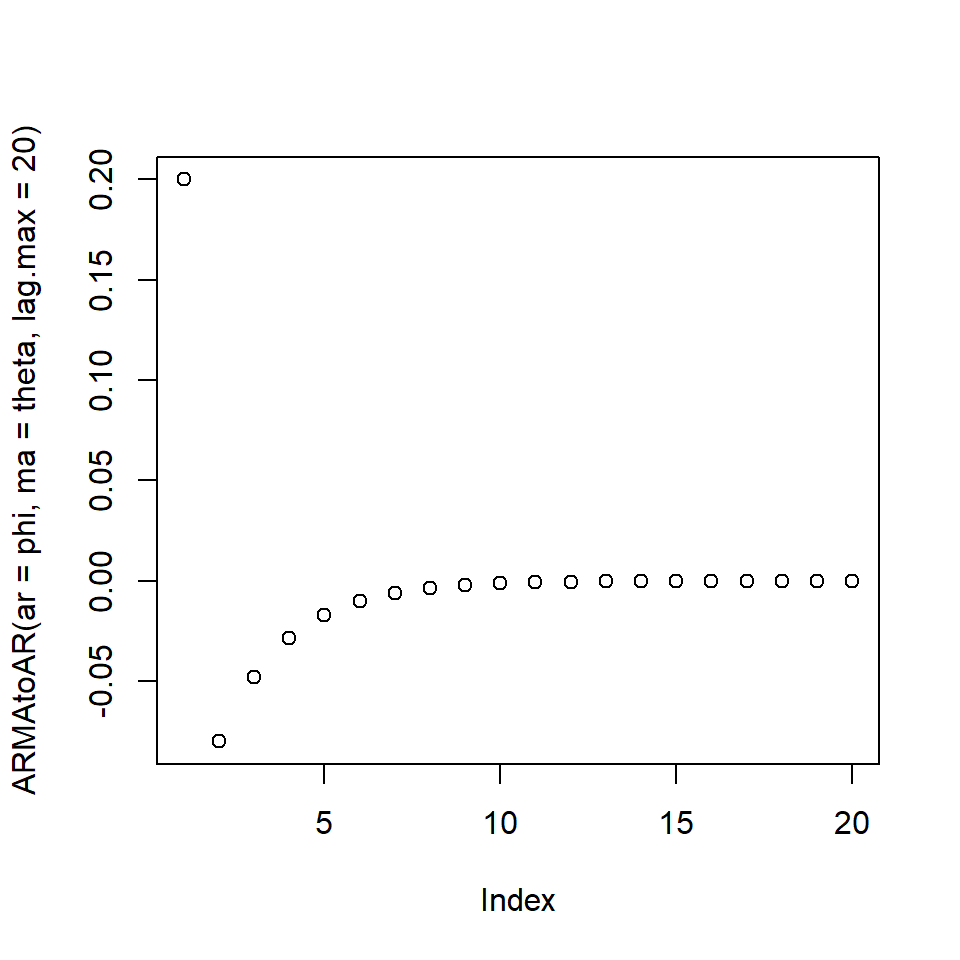
[1] -0.20000 0.12000 0.00800 0.02720 0.01248[1] 0.20000 -0.08000 -0.04800 -0.02880 -0.01728