Tema 2: Análisis multivariado de series temporales(1)
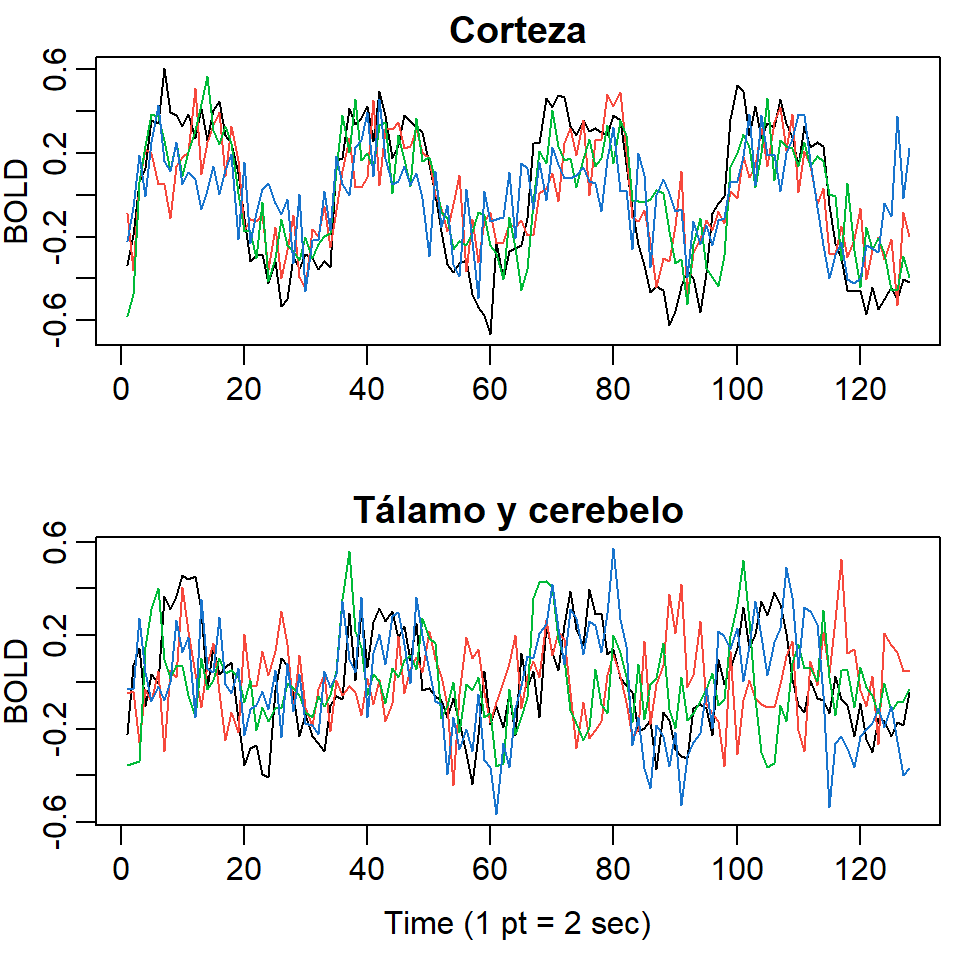
Ejemplo 2: Imagen por resonancia magnética
- Un estímulo fue aplicado a cinco personas en la mano por 32 segundos y luego paró el estímulo por otros 32 segundos, sucesivamente.
- Durante 256 segundos, cada 2 segundos se registró la intensidad del dependiente del nivel en la sangre (BOLD, blood oxygenation-level dependent signal intensity), la cual mide áreas de activación en el celebro \((T=128)\).
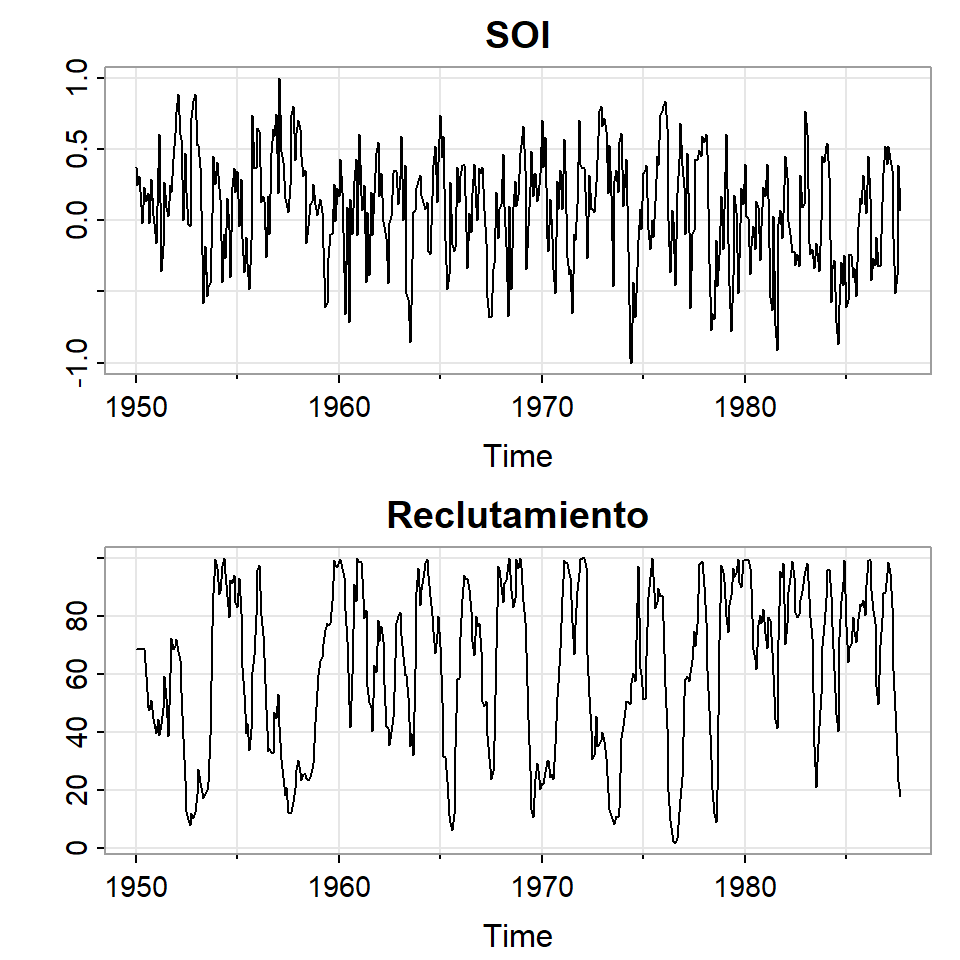
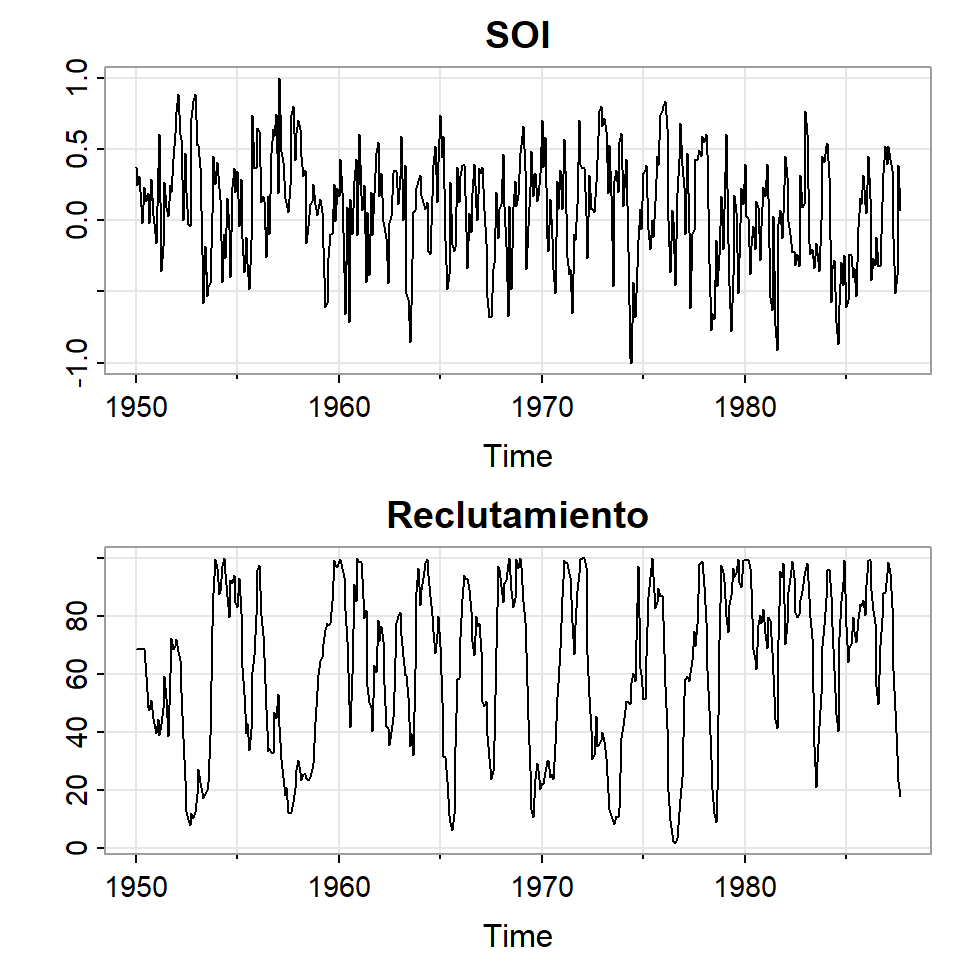
Ejemplo 1: El Niño y la población de peces
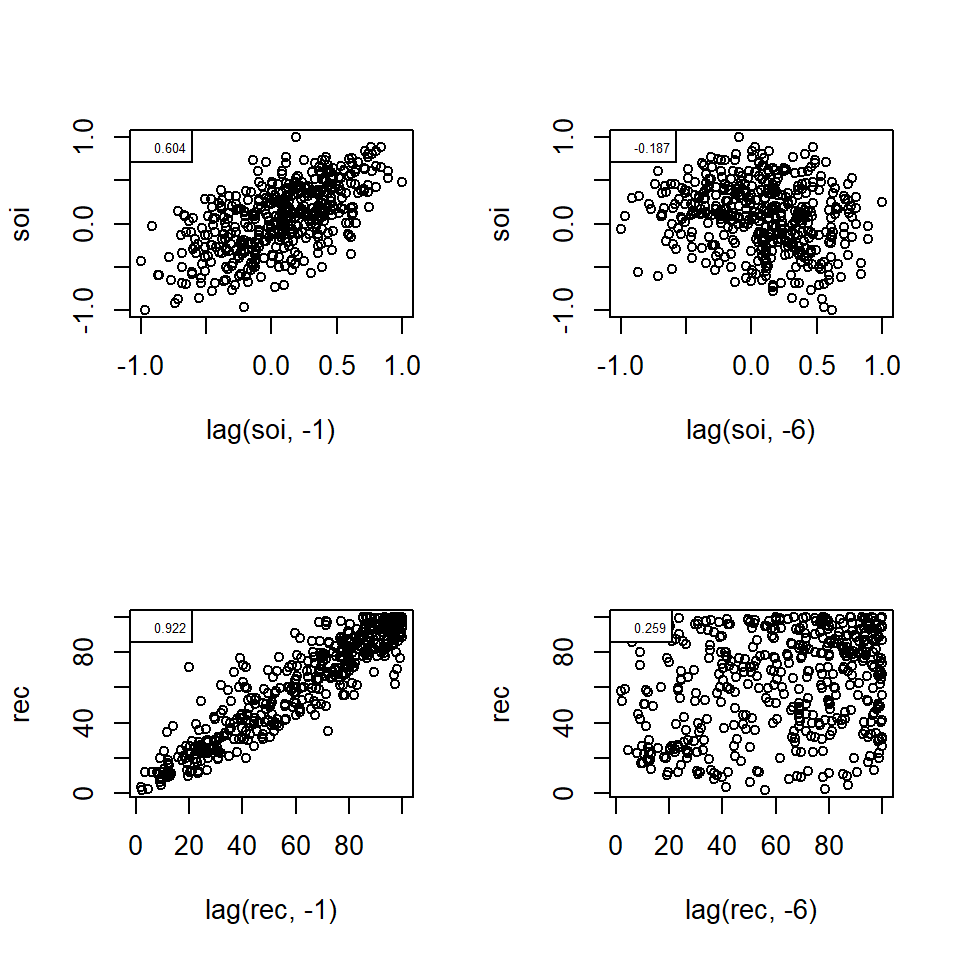
- Se tiene la serie ambiental de índice de oscilación del sur (SOI, Southern Oscillation Index), y la serie de número de peces nuevos (Reclutamiento) de 453 meses de 1950 a 1987.
- SOI mide cambios en presión relacionada a la temperatura del superficie del mar en el oceano pacífico central, el cual se calienta cada 3-7 años por el efecto El Niño.
[1] 0.60 0.37 0.21 0.05 -0.11 -0.19 -0.18 -0.10 0.05 0.22 0.36 0.41
[13] 0.31 0.10 -0.06 -0.17 -0.29 -0.37 -0.32 -0.19 -0.04 0.15 0.31 0.35
[25] 0.25 0.10 -0.03 -0.16 -0.28 -0.37 -0.32 -0.16 -0.02 0.17 0.33 0.39
[37] 0.30 0.16 0.00 -0.13 -0.24 -0.27 -0.25 -0.13 0.06 0.21 0.38 0.40 [1] 0.92 0.78 0.63 0.48 0.36 0.26 0.18 0.13 0.09 0.07 0.06 0.02
[13] -0.04 -0.12 -0.19 -0.24 -0.27 -0.27 -0.24 -0.19 -0.11 -0.03 0.03 0.06
[25] 0.06 0.02 -0.02 -0.06 -0.09 -0.12 -0.13 -0.11 -0.05 0.02 0.08 0.12
[37] 0.10 0.06 0.01 -0.02 -0.03 -0.03 -0.02 0.01 0.06 0.12 0.17 0.20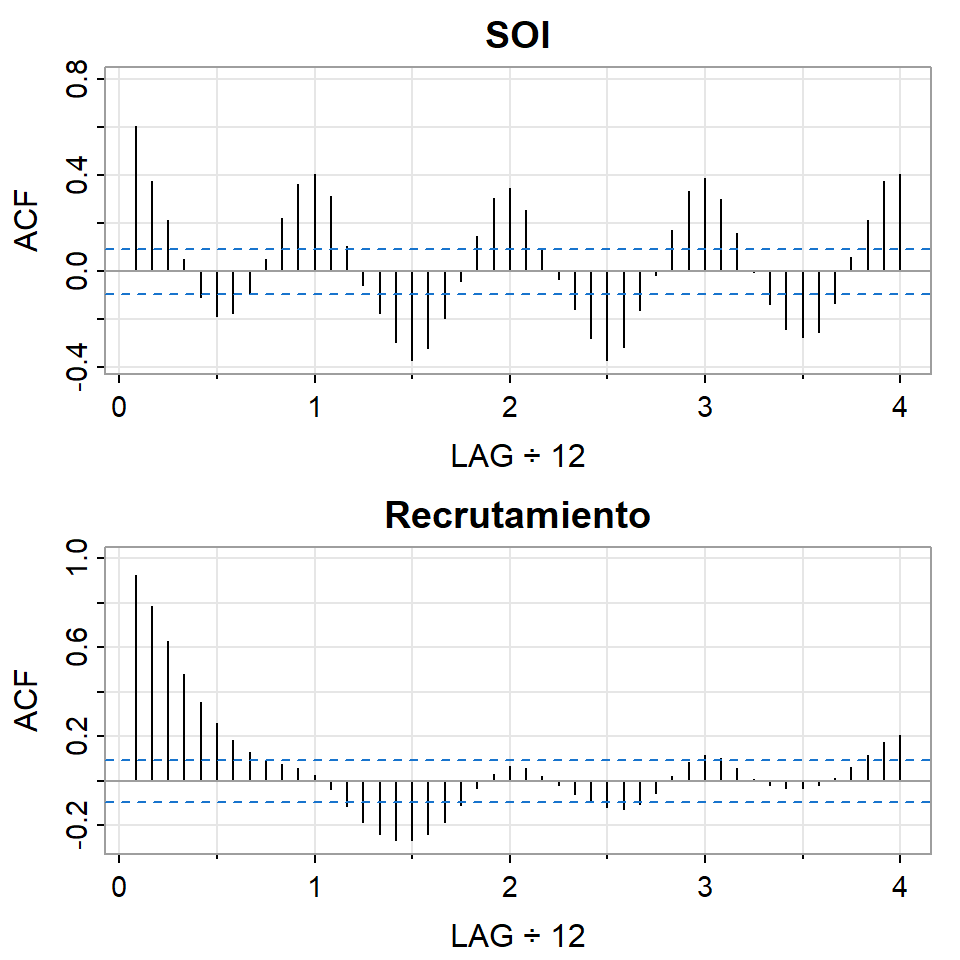
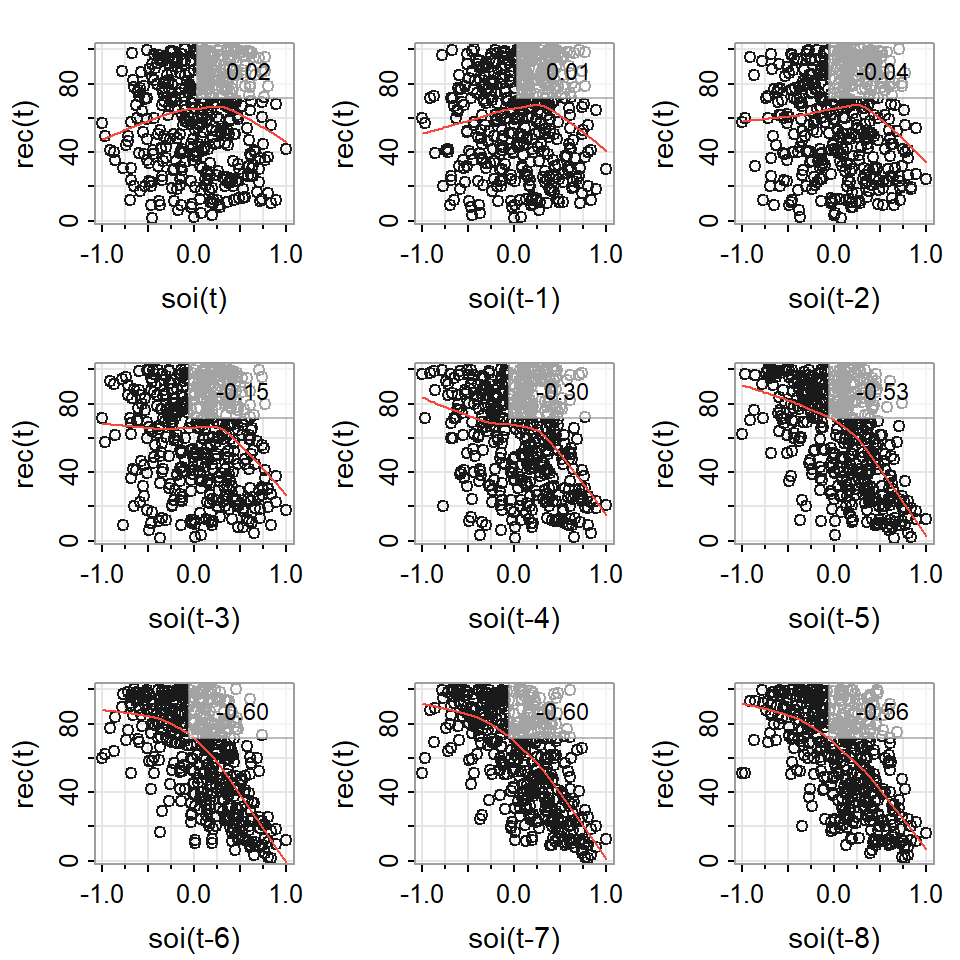
Gráfico de dispersión de REC contra SOI rezagadas
Considere un ruido blanco Gaussiano: \[a_t \sim N\left( \left( \begin{array}{c} 0\\ 0 \end{array}\right) , \begin{bmatrix}1.5 & 0.8 \\ 0.8 & 1 \end{bmatrix} \right).\]
Note que su función de autocovariancia es \[\Gamma(h)=\left\lbrace \begin{aligned} \begin{bmatrix}1.5 & 0.8 \\ 0.8 & 1 \end{bmatrix} & & h = 0, \\ 0, & & h \neq 0. \end{aligned} \right.\]
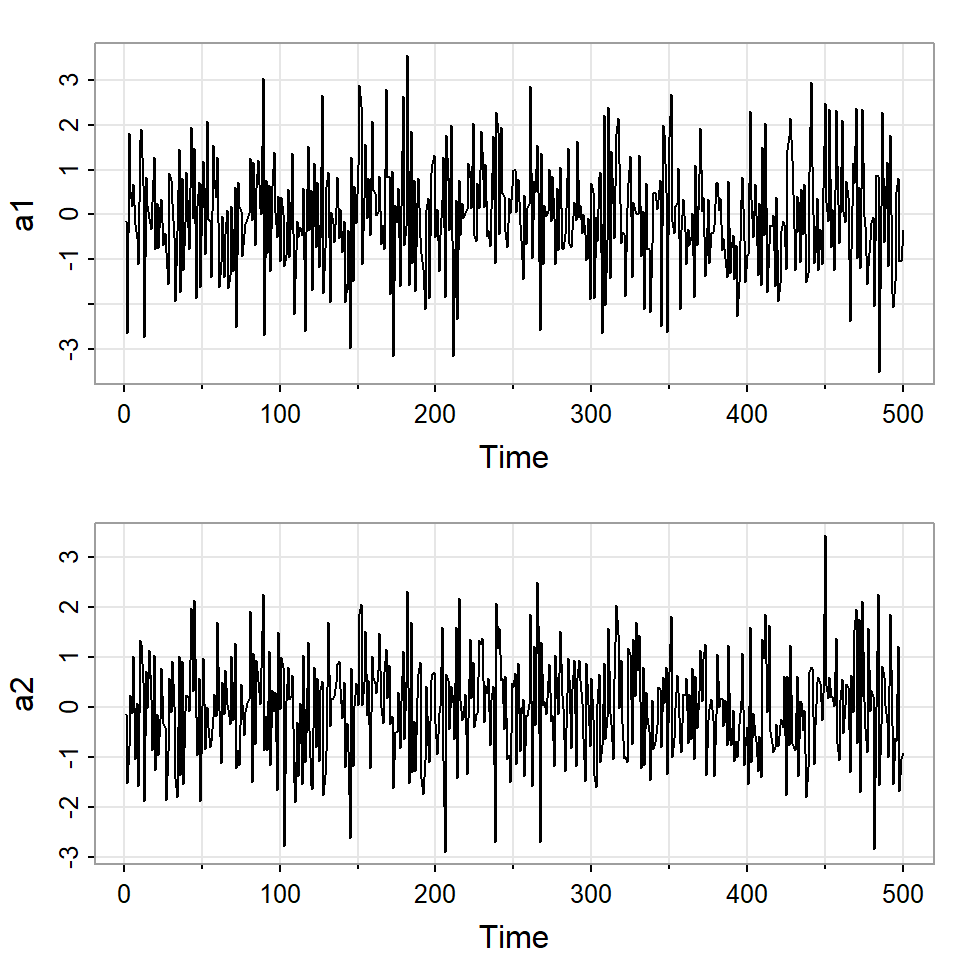
Ruido blanco
Considere \[a_t \sim N\left(0, \begin{bmatrix}1.5 & 0.8 \\ 0.8 & 1 \end{bmatrix} \right).\]
Note que su función de autocovariancia es \[\Gamma(h)=\left\lbrace \begin{aligned} \begin{bmatrix}1.5 & 0.8 \\ 0.8 & 1 \end{bmatrix} & & h = 0 \\ 0, & & h \neq 0, \end{aligned} \right.\]
Simulación con \(T=500\).
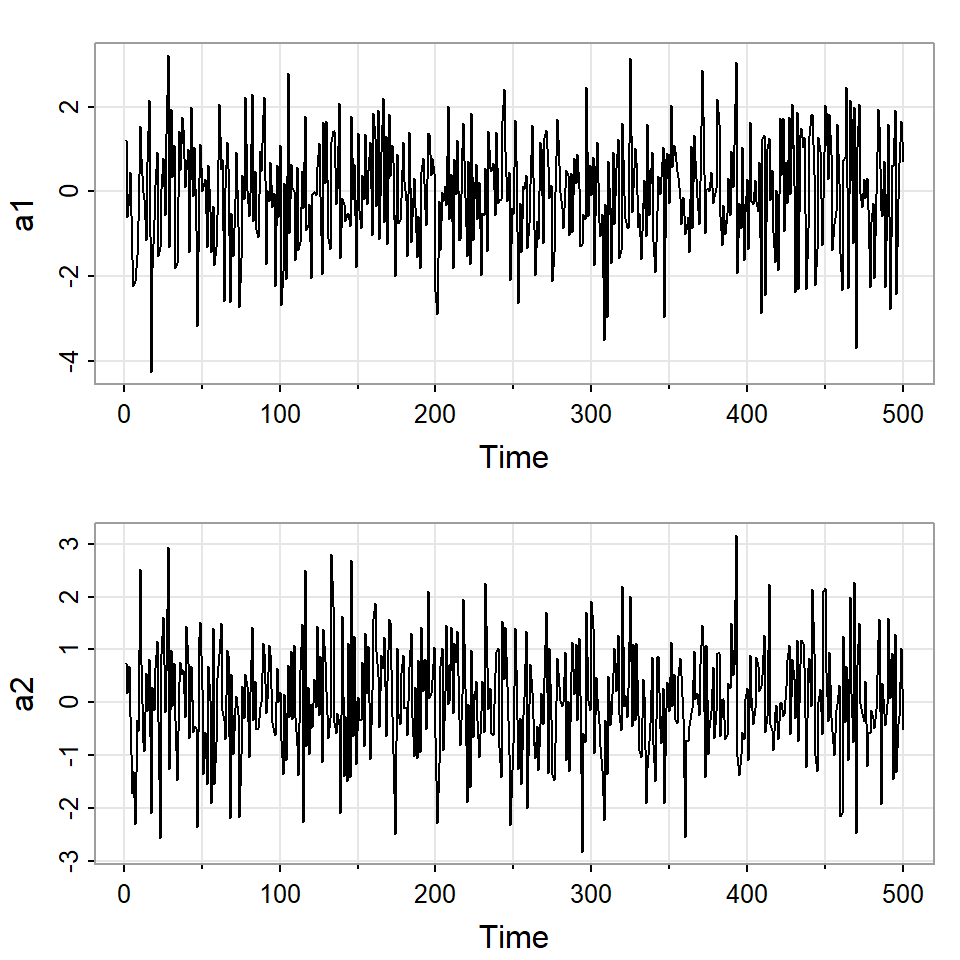
Ruido blanco
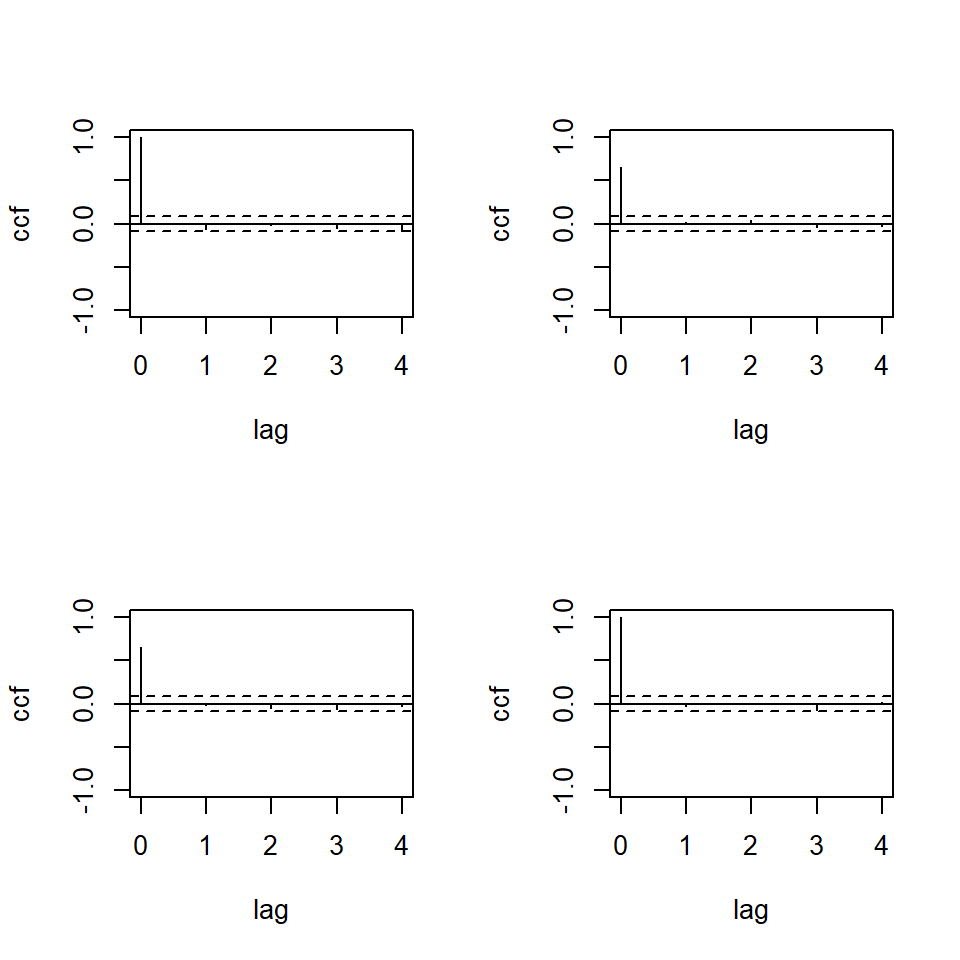
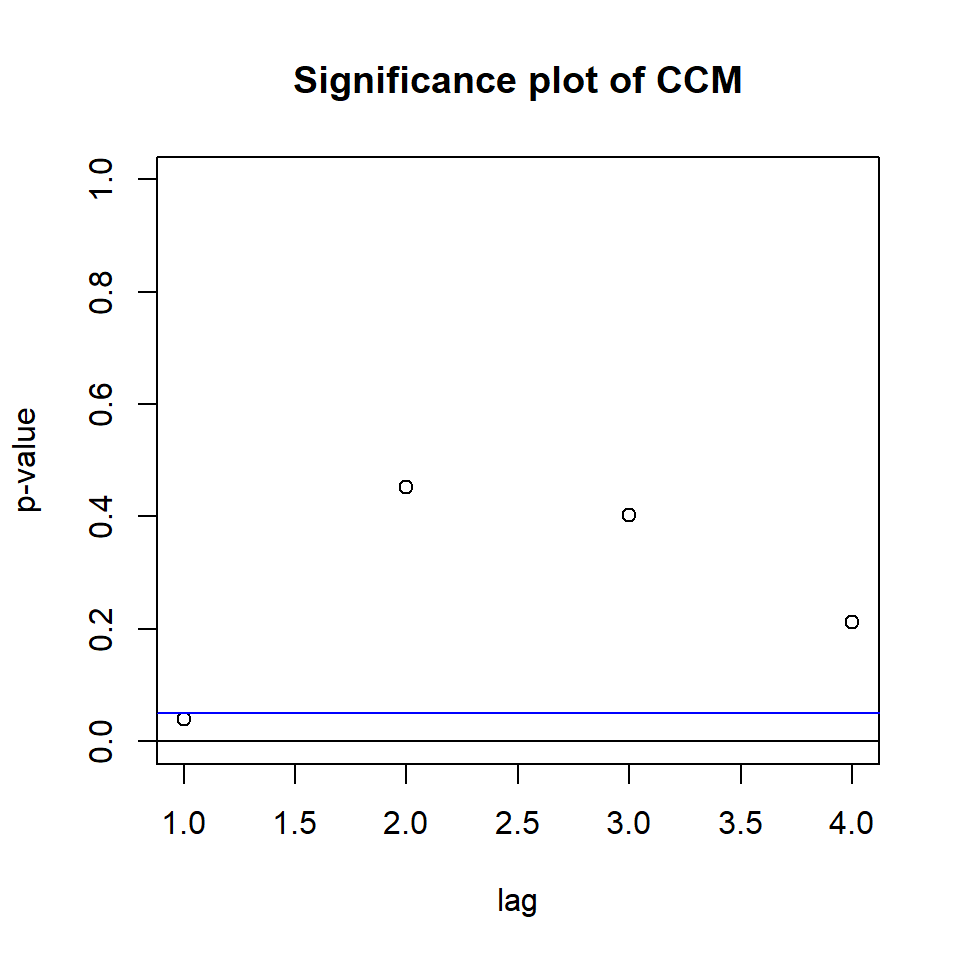
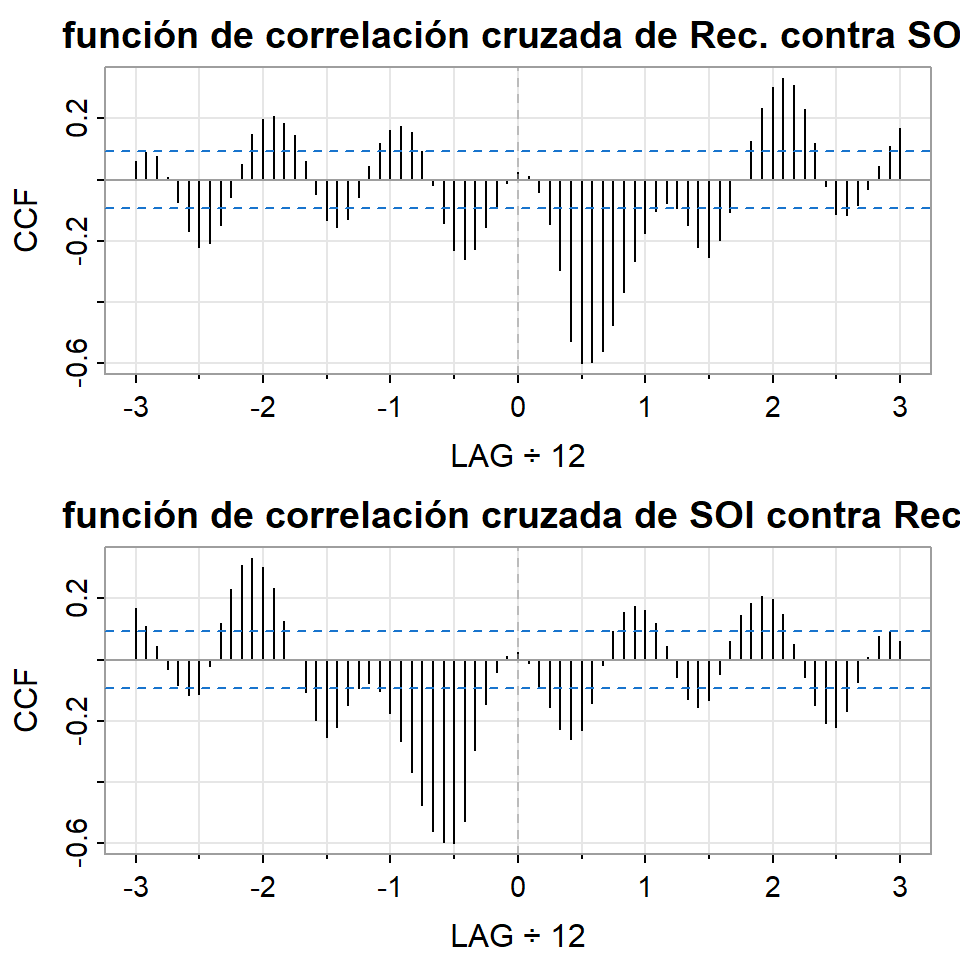
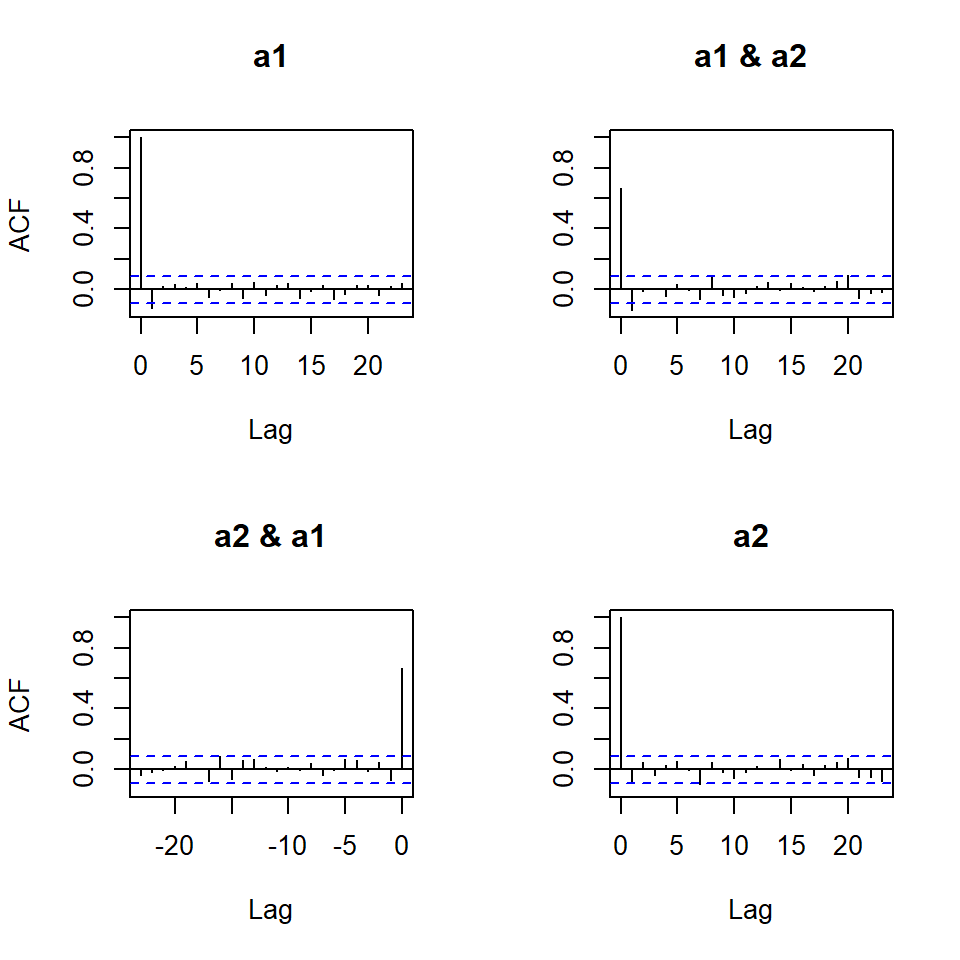
- Otra posibilidad es usar correlograma y función de autocorrelación cruzada.
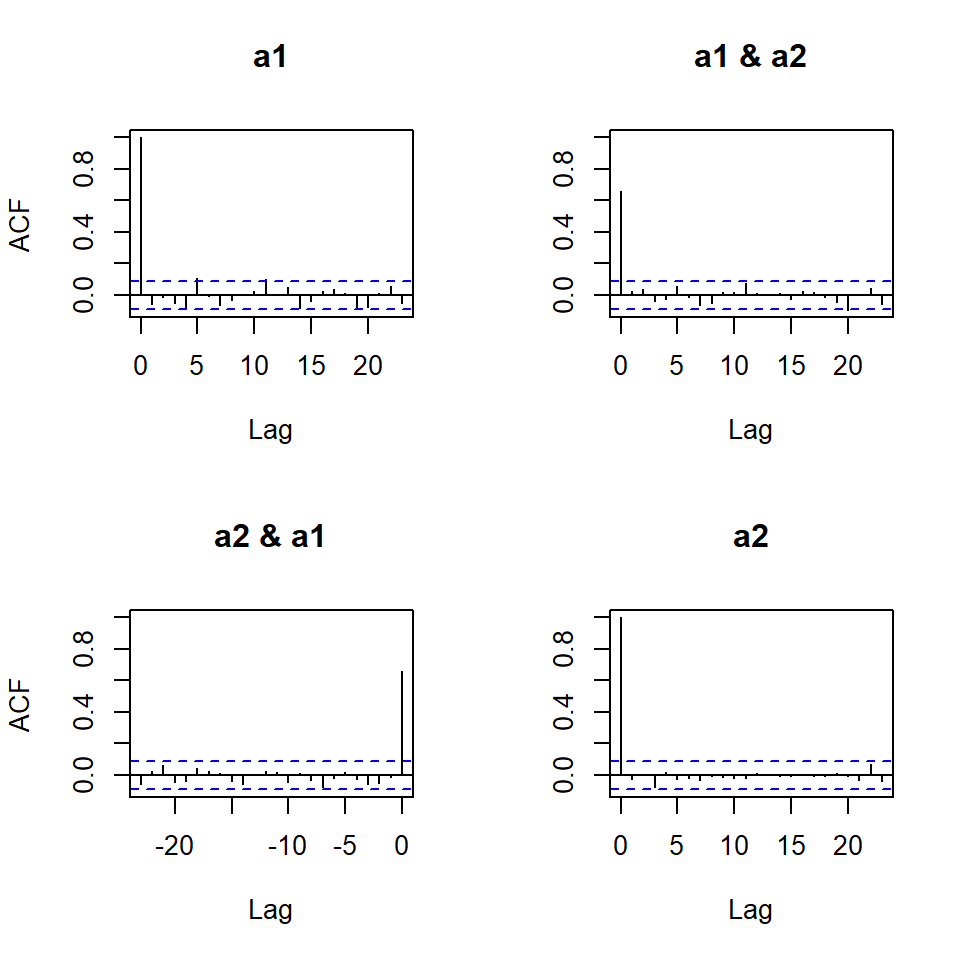
Ruido blanco
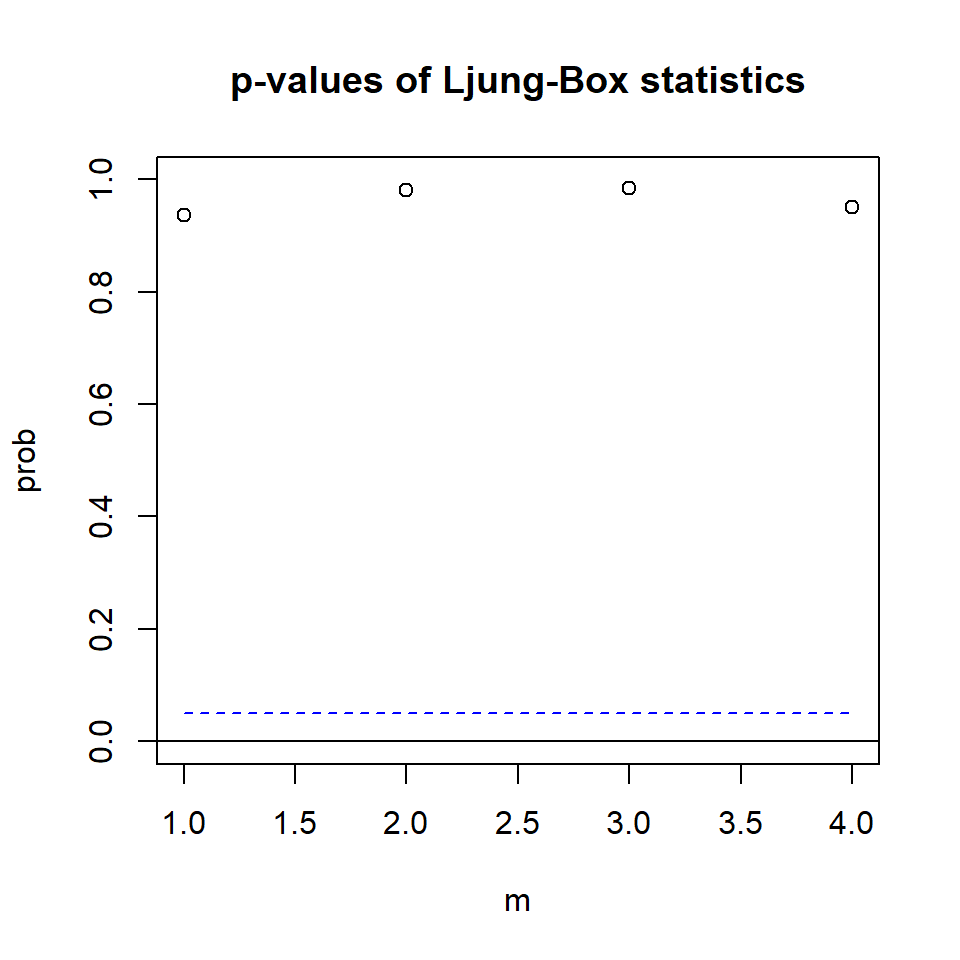
Ljung-Box Statistics:
m Q(m) df p-value
[1,] 1.00 3.60 9.00 0.94
[2,] 2.00 7.87 18.00 0.98
[3,] 3.00 13.66 27.00 0.98
[4,] 4.00 23.22 36.00 0.95