Tema 3: Modelos de Espacio-Estado(2)

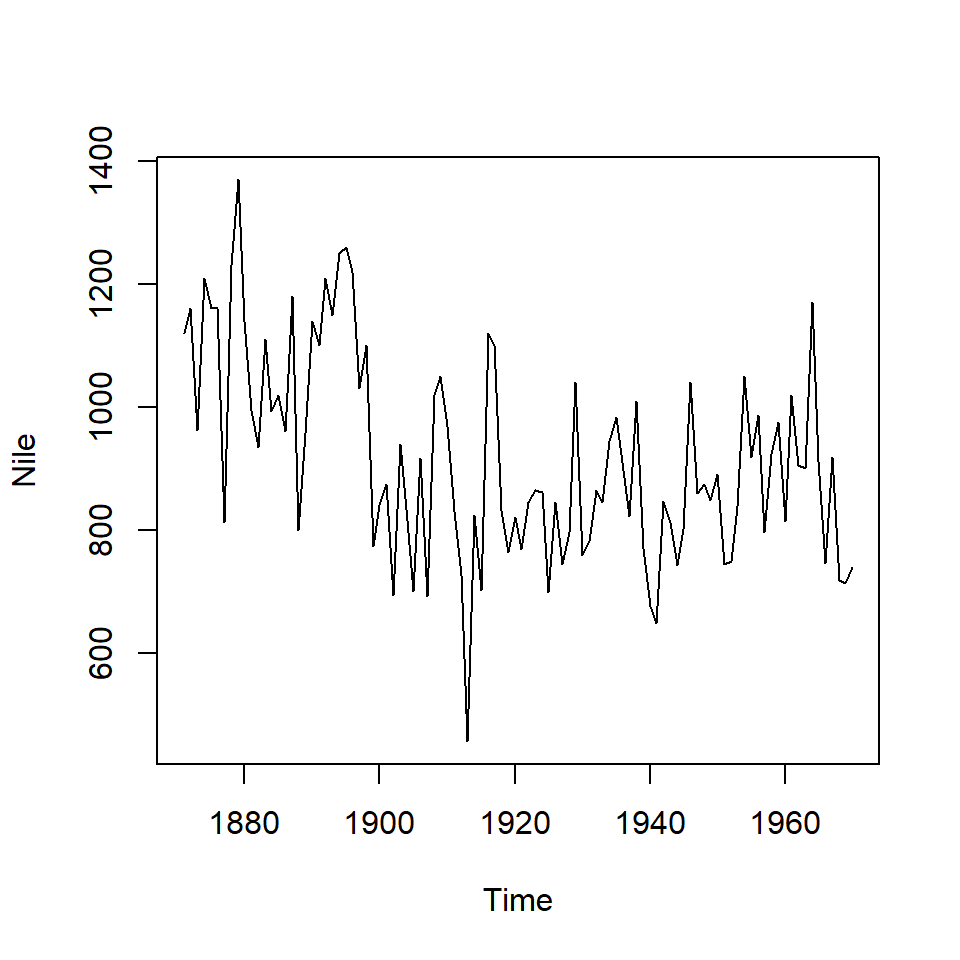
Ejemplo: Caudal anual del Rio Nilo
Mediciones del caudal anual del Nilo en Asuán, Egipto., 1871–1970, en \(10^8 m^3\),

foreNile <- dlmForecast(filterNile, nAhead = 10)
attach(foreNile)
hwidth <- qnorm(0.25, lower = FALSE) * sqrt(unlist(Q))
fore <- cbind(f, as.vector(f) + hwidth %o% c(-1, 1))
rg <- range(c(fore, window(Nile, start = c(1900, 1))))+c(0,300)
plot(fore, type = "o", pch = 16, plot.type = "s", lty = c(1, 3, 3),
ylab = "Nile level", xlab = "", xlim = c(1900, 1980), ylim = rg)
lines(window(Nile, start = c(1900, 1)), type = 'o')
lines(window(smoothNile$s, start = c(1900,1)), lty = 5)
abline(v = mean(c(time(f)[1], tail(time(Nile), 1))),
lty = "dashed", col = "darkgrey")
legend("topleft", lty = c(1, 5, 1, 3), pch = c(1, NA, 16, 16), bty = "n",
legend = c("observed level", "smoothed level", "forecasted level",
"50% probability limits"))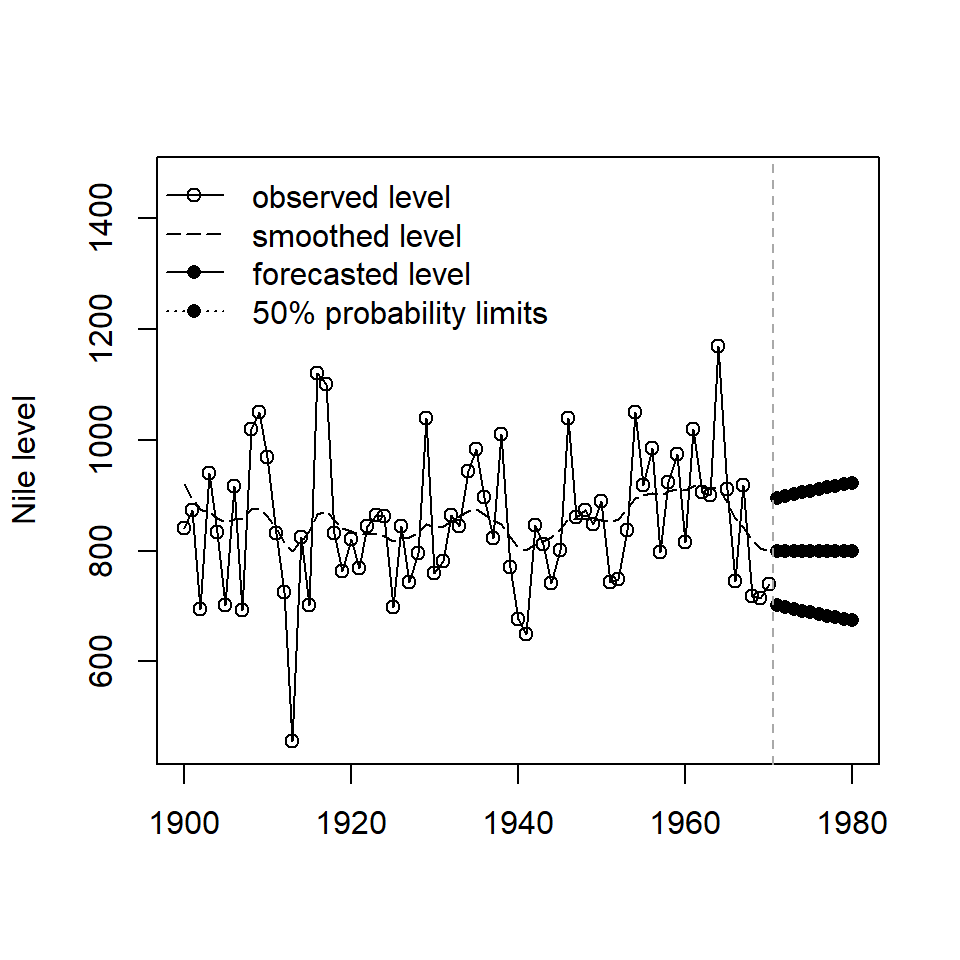
modNile2 <- dlm.orden2(fit2$par)
filteredNile <- dlmFilter(Nile, mod = modNile2)
resids <- residuals(filteredNile, sd = FALSE)
smoothNile <- dlmSmooth(Nile, modNile2)
theta1 <- dropFirst(smoothNile$s[, 1])
theta2 <- dropFirst(smoothNile$s[, 2])
par(mfrow = c(3, 1), mar = c(2.2, 2.2, 1, 1), cex = 0.8)
plot.ts(Nile, col = "darkgrey", xlab = "", ylab = "", lwd = 2)
lines(theta1, col = "black")
legend("topright", legend = c("Observación", "Estado"),
lwd = c(2, 1), col = c("darkgrey", "black"), bty = "n")
plot.ts(theta2, col = "darkgrey", xlab = "", ylab = "",
lwd = 2)
legend("topright", legend = "Pendiente", lwd = 2, col = "darkgrey",
bty = "n")
plot.ts(resids, ylab = "", xlab = "", col = "darkgrey",
lwd = 2)
abline(h = 0)
legend("topright", legend = "Residuales", lwd = 2, col = "darkgrey",
bty = "n")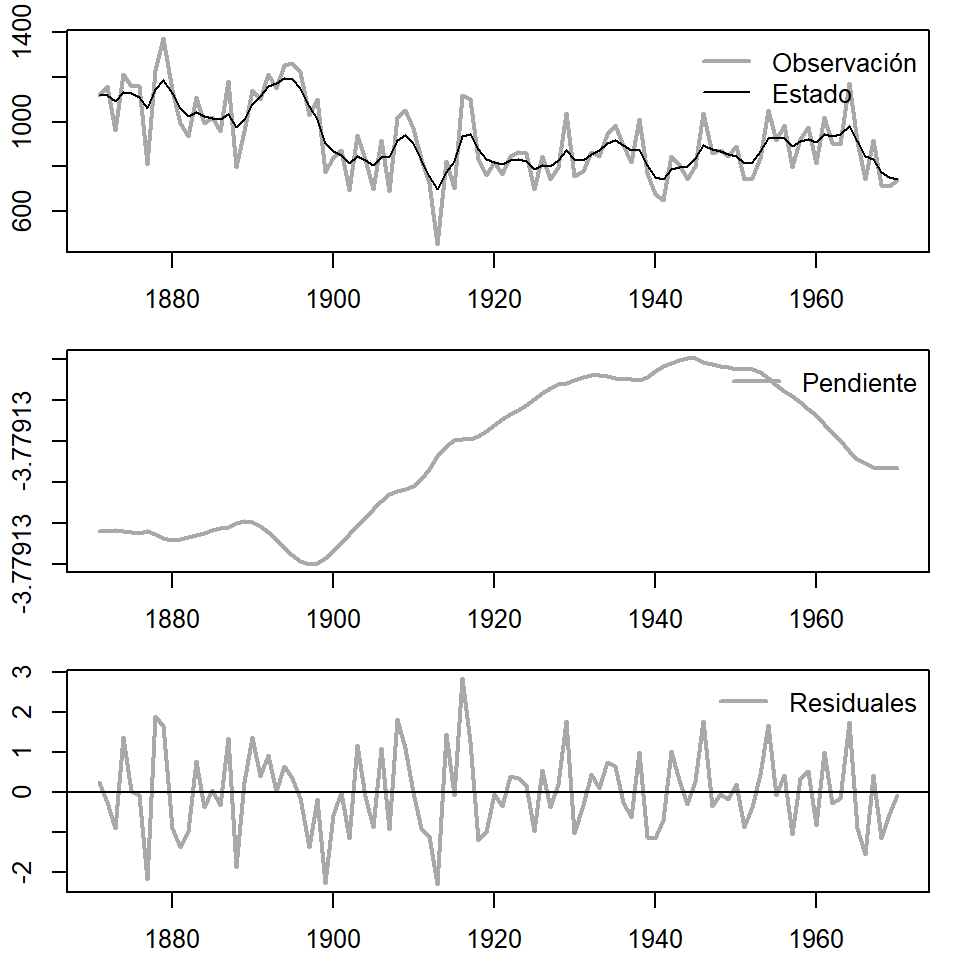
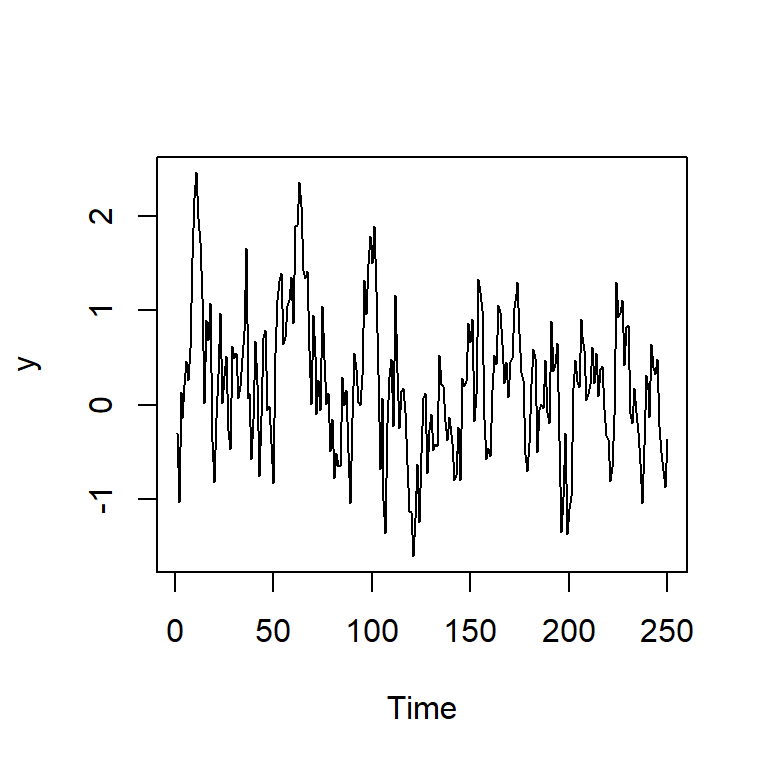
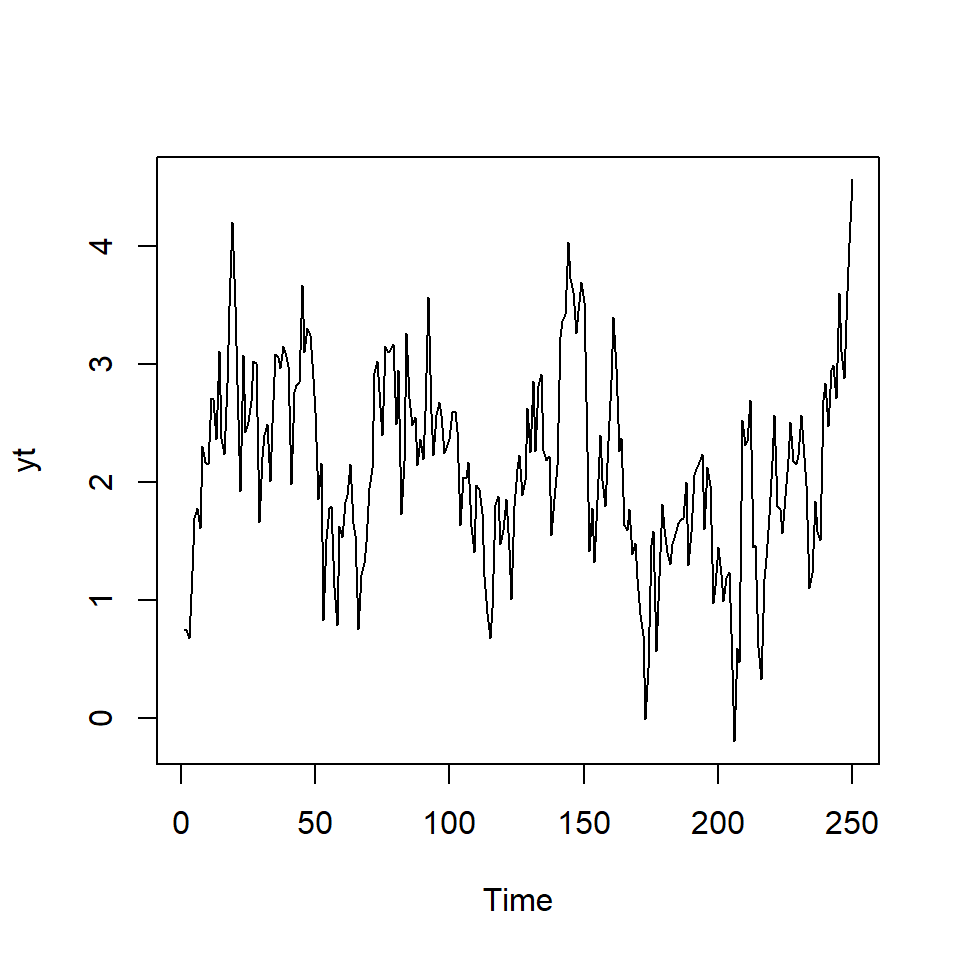
Ejemplo: AR(1)
- Considere un AR(1): \[Y_t=\phi Y_{t-1}+a_t, \text{ para } t=1,2,...\]
Ejemplo: dlmModPoly y dlmModARMA
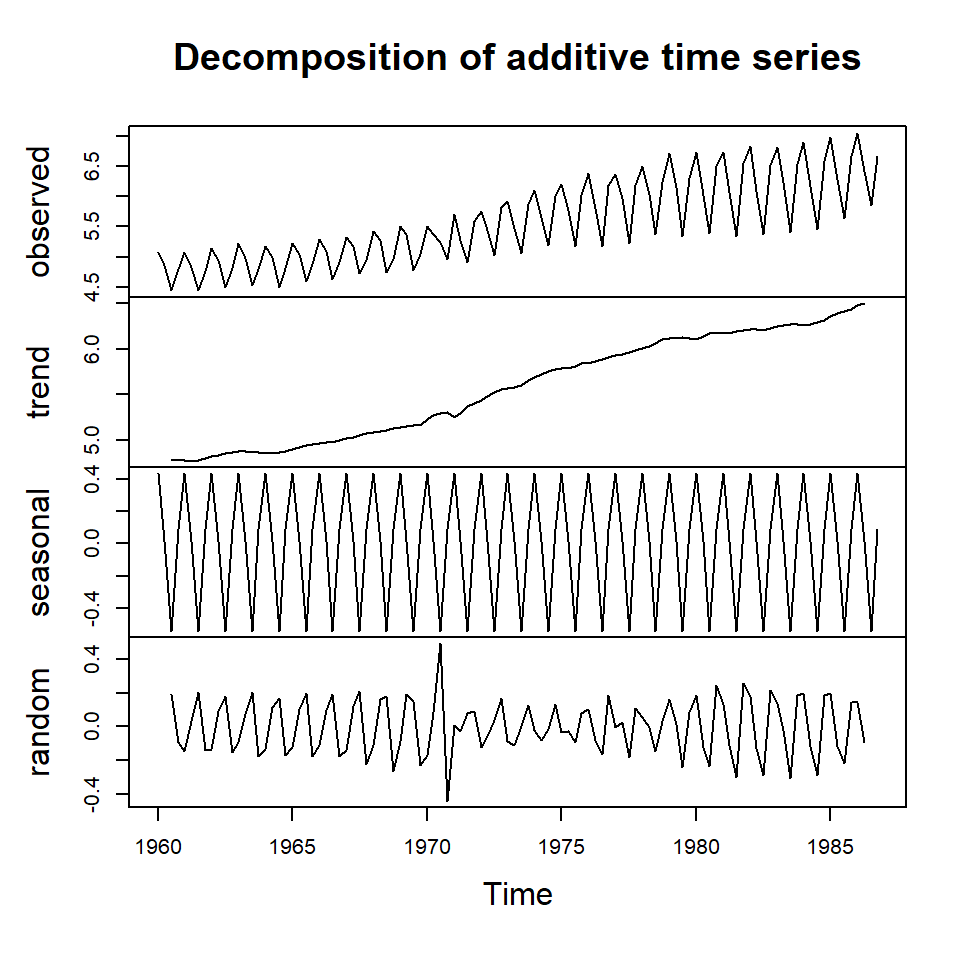
Ejemplo
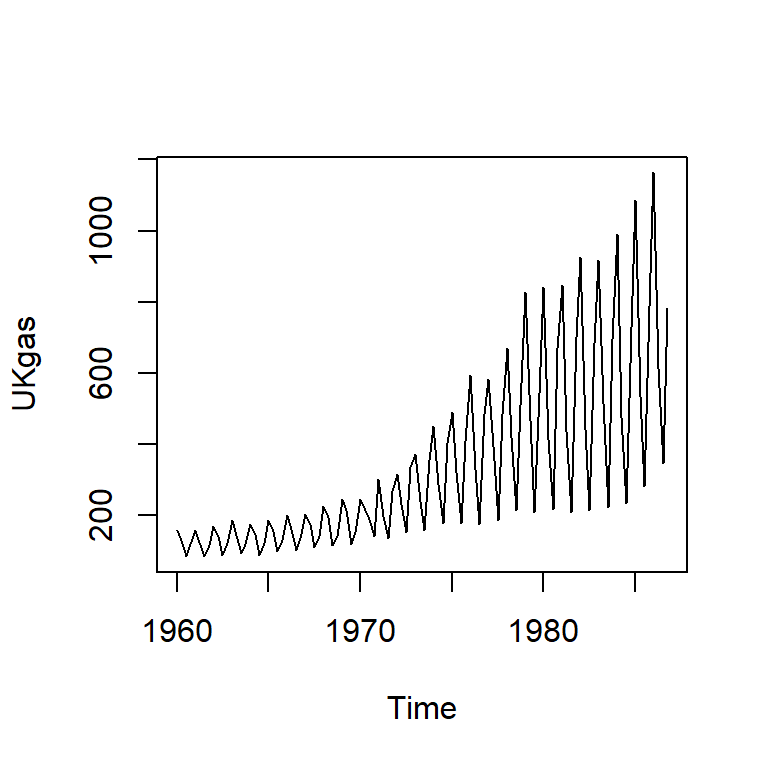
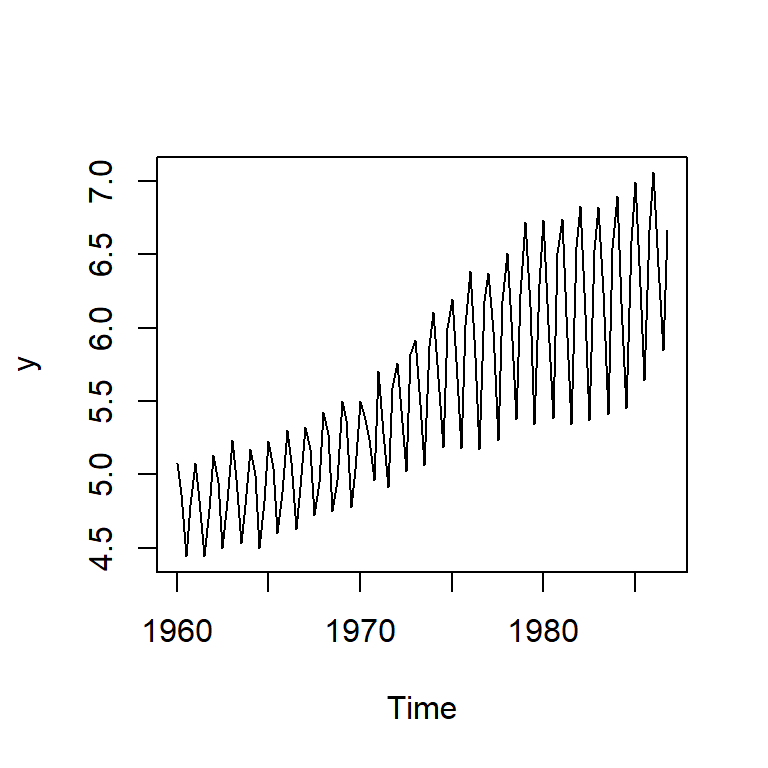
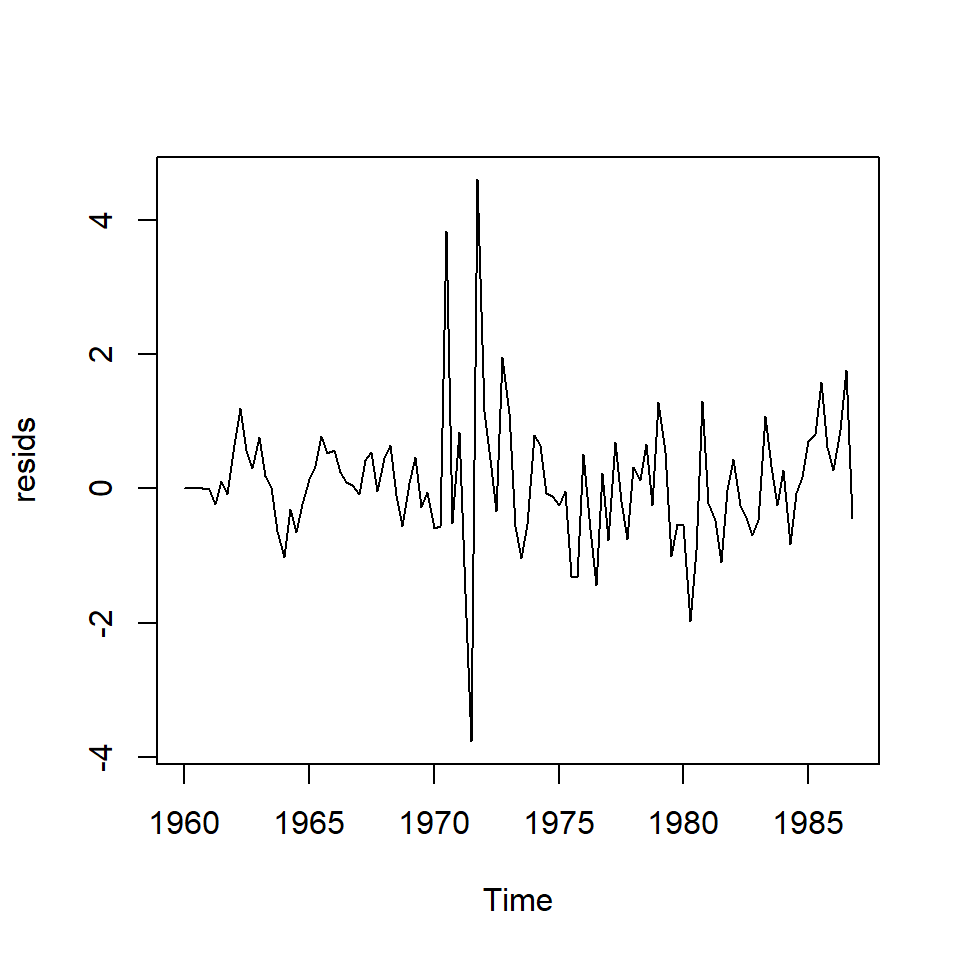
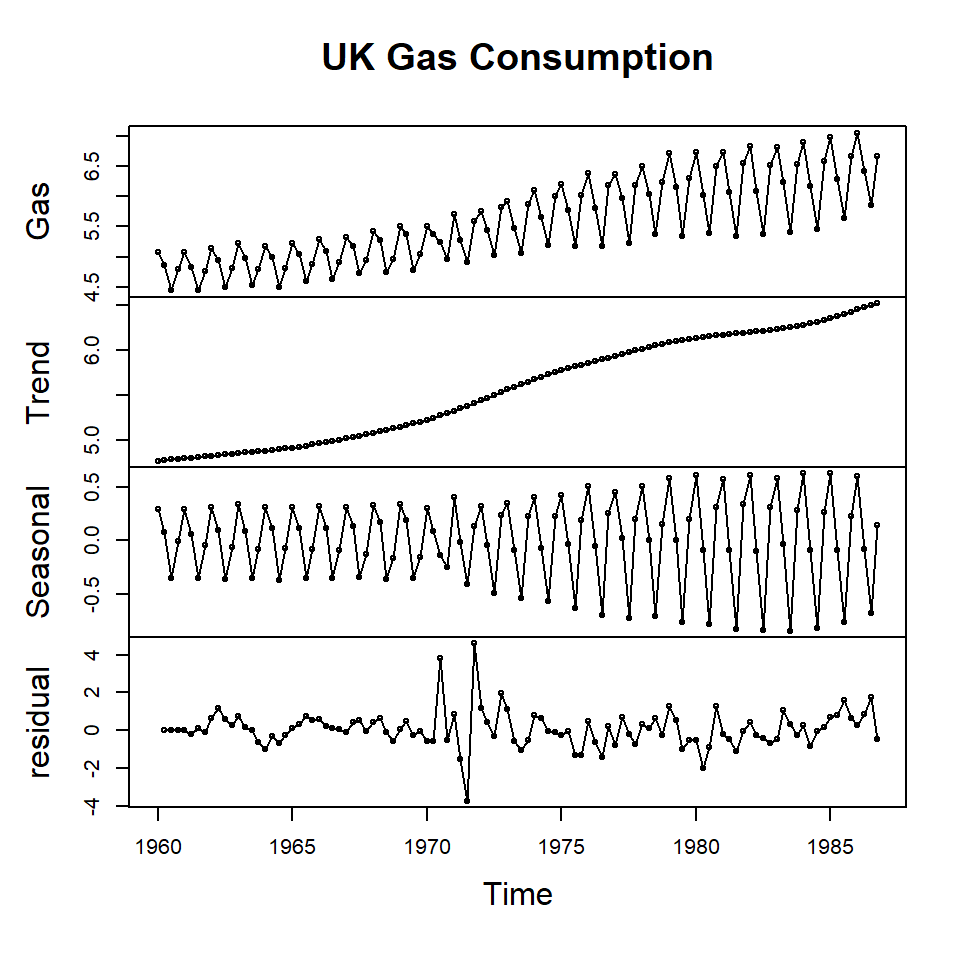
- Consumo trimestral de gas en el Reino Unido desde el primer trimestre de 1960 hasta el cuarto trimestre de 1986, en millones de termas.