Se tienen datos de sobrevivencia de 16 ratones luego de una cirugía de prueba: 9 ratones en el grupo control y 7 ratones en el grupo de tratamiento.
Grupo
Tiempo de sobrevivencia(días)
Media
Tratamiento
94,197,16,38,99,141,23
86.86
Control
52,104,146,10,51,30,40,27,46
56.22
¿Podemos decir que el tratamiento es efectivo?
En estadística, resolvemos esa pregunta estimando \(\bar{X}- \bar{Y} = 30.63\). El problema es cómo calcular la variabilidad, ¿podemos suponer lo mismo de siempre?
Tenemos dos opciones:
la primera utilizar el teorema del límite central (teoría asintótica).
La segunda es utilizar el estadístico:
\[T = \frac{\bar{X}- \bar{Y}}{\sqrt{\hat{ee}_{\bar{X}}^2 + \hat{ee}_{\bar{Y}}^2}}\] - ¿Cuál es el problema? En el caso asintótico, necesitamos de una muestra grande, y en el segundo caso, la distribución de \(T\) NO es conocida (podríamos usar la aproximación de Satterthwaite, pero eso sería solo una aproximación).
Definición: La inferencia estadística es el procedimiento de producir afirmaciones probabilísticas sobre alguna (o toda) parte del modelo estadístico.
Definición: La estadística paramétrica consiste en realizar inferencia cuando el modelo estadístico puede ser representado por medio de uno o varios (finitos) parámetros desconocidos de una distribución.
Definición: dos definiciones informales de la estadística no paramétrica:
Inferencia en modelos estadísticos que son de dimensión infinita.
Conjunto de herramientas cuyo objetivo es realizar inferencia usando los menos supuestos posibles.
Modelos estadísticos y familias de modelos
Ejemplo:
Una empresa produce componentes eléctricos y el interés es medir la vida útil del componente (en años). Suponemos que la vida útil de los componentes sigue una distribución exponencial con parámetro \(\beta>0\).
\[f(y)= \begin{cases}\frac{1}{\beta} e^{-y/\beta}, & 0 < y < \infty, \\ 0, & y \leq 0, \end{cases}\]
Definición: Un modelo estadístico consiste en una identificación de variables aleatorias de interés, la especificación de una distribución conjunta, o una familia de posibles distribuciones conjuntas para unas variables aleatorias observables, la identificación de uno o varios parámetros de dichas distribuciones son desconocidas.
Ejemplos: Para el caso de componentes eléctricos, se tienen las variables aleatorias \(Y_1,...,Y_n\) cuya distribución conjunta es:
en donde \(f(y_i)\) es la densidad de la distribución exponencial con parámetro \(\beta>0\), i.e.
\[f(y)= \begin{cases}\frac{1}{\beta} e^{-y/\beta}, & 0 < y < \infty, \\ 0, & y \leq 0. \end{cases}\]
La familia de posibles distribuciones conjuntas es \[\left\lbrace f(y_1,...,y_n|\beta), \beta >0 \right\rbrace.\]
Estadística paramétrica y no paramétrica
Ejemplos:
El ejemplo de componentes eléctricos corresponde a estadística paramétrica.
Sea \(X_1,...,X_n\) una muestra aleatoria de una población con función de distribución \(F\). Realizar inferencia sobre la función de distribución \(F(x)=P(X\leq x)\) y la función de densidad \(f(x)=F'(x)\).
Como \(F\) y \(f\) no puede ser representada por medio de un conjunto finito de parámetros, la inferencia es no paramétrica.
Sea \((Y_1, X_1), ... ,(Y_n,X_n)\) una muestra aleatoria de dos variables aleatorias. Realizar inferencia sobre un modelo de regresión lineal \(Y_i=\beta X_i+\epsilon_i\), \(\epsilon_i \sim N(0,\sigma^2)\).
La inferencia es paramétrica, pues el modelo estadístico puede ser representado por \(\theta=(\beta,\sigma^2)\).
Sea \((Y_1, X_1), ... ,(Y_n,X_n)\) una muestra aleatoria de dos variables aleatorias. Realizar inferencia sobre un modelo de regresión \(Y_i=f(X_i)+\epsilon_i\).
La inferencia es no paramétrica.
Distribución empírica
Para una muestra \(X_1, \dots, X_n\) de variables aleatorias con valores reales, independientes con distribución \(P\), definimos la distribución \(\hat{P}\) como:
\[\hat{P}(A) = \frac{1}{n}\sum_{i=1}^{n} I_A(X_i),\] para \(A \subseteq \mathbb{R}\) y \(I_A(X_i)\) es la función indicadora definida como:
\[I_A(X_i)=\left\lbrace \begin{aligned}
1 & \text{, si } X_i \in A, \\
0 & \text{, si } X_i \notin A.
\end{aligned} \right.\]
\(\hat{P}\) es la distribución empírica de la muestra \(X_1,...,X_n\).
\(\hat{P}\) puede pensarse como una distribución que pone masa \(1/n\) en cada observación \(X_i\) (para valores que ocurren más de una vez la masa será un múltiplo de \(1/n\)). Entonces, \(\hat{P}\) es una distribución de probabilidad discreta con un espacio efectivo de muestreo \({X_1, \dots, X_n}\).
Resultados teóricos:
Puede demostrarse que \(\hat{P}\) es consistente para estimar \(P\).
Y además, \(\hat{P}\) es el estimador máximo verosímil no paramétrico de \(P\), lo cual justifica que podamos estimar \(P\) con \(\hat{P}\) sin tener otra información acerca de P (como por ejemplo si P pertenece a una familia paramétrica).
Sea \(A \subseteq \mathbb{R}\) (tal que \(P(A)\) está definido), entonces la consistencia significa que: \(\hat{P}(A) \xrightarrow{p} P(A)\) cuando \(n \rightarrow \infty\).
Este resultado es una consecuencia directa de La Ley de los Grandes Números, ya que:
por lo que \(\hat{P}(A)\) tiende a su valor esperado \(P(A)\) cuando \(n \rightarrow \infty\). Este resultado puede formalizarse mediante:
\[\sup_{A\in I}|\hat{P}(A)-P(A)| \rightarrow 0 \quad \text{cuando} \quad n \rightarrow \infty\] donde \(I\) es el conjunto de intervalos en \(\mathbb{R}\). En otras palabras, la distribución \(P(A)\) puede ser aproximada por \(\hat{P}(A)\) igual de bien para toda \(A\in I\).
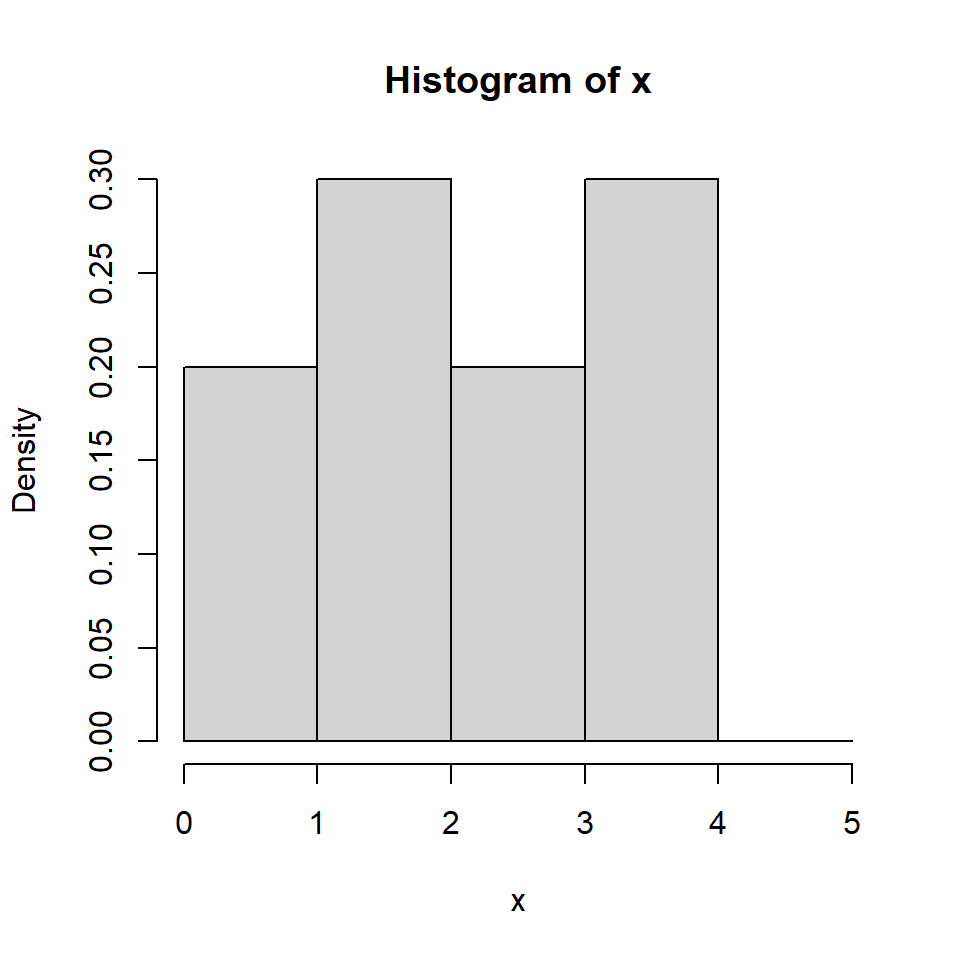
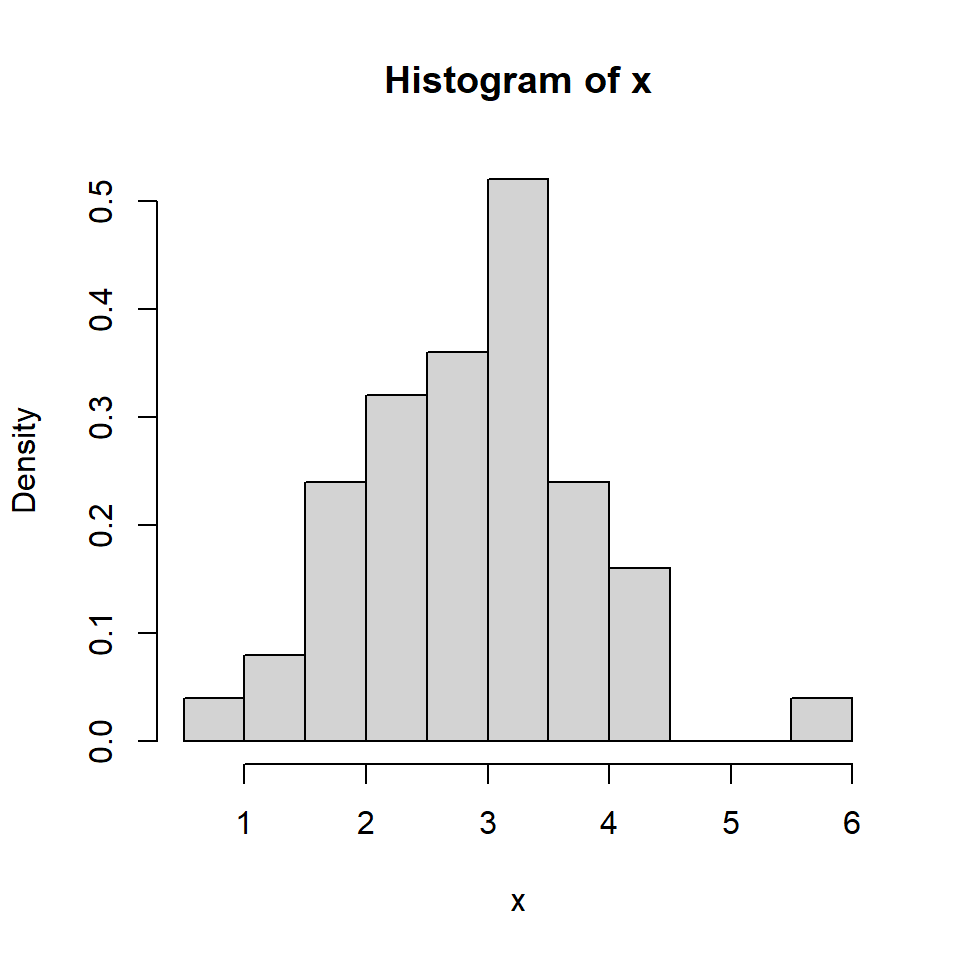
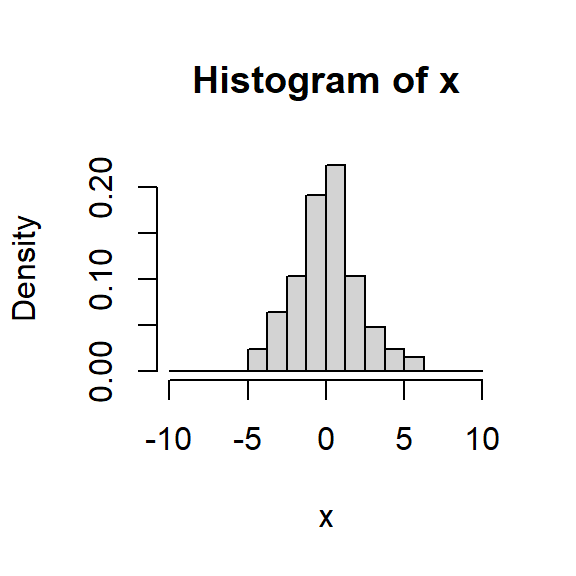
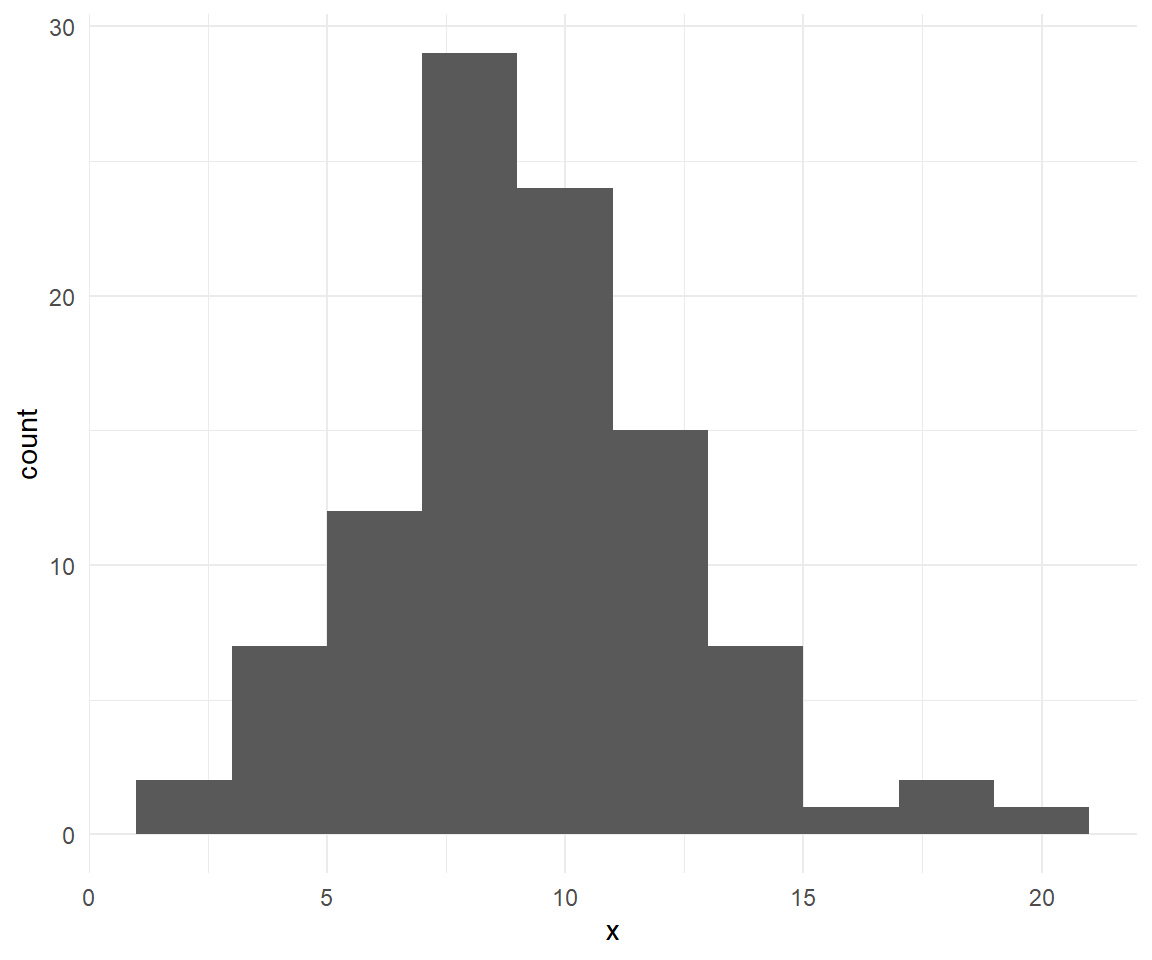
Histograma
Para una muestra aleatoria \(X_1, \dots, X_n\) de una población con función de densidad desconocida \(f\).
Escoja \(x_0\) y \(h\) el ancho del segmento y calcule los límites de cada segmento: \[B_j = \left[ x_0 + (j-1)h, x_0+jh \right],~~~ j \in \mathbb{Z}.\]
Cuente cuántas observaciones caen en cada segmento \(j\), denotada por \(n_j\):
Para cada segmento \(j\), calcule la frecuencia relativa \[f_j = \frac{n_j}{nh}.\]
Grafique el histograma usando barras de altura \(f_j\) y ancho \(h\).
Formalmente, el histograma es dado por \[\hat{f}_h(x)=\frac{1}{nh} \sum_{i=1}^n \sum_{j} I(X_i \in B_j) I(x \in B_j),\] donde \[I(X_i \in B_j)=\left\lbrace \begin{aligned}
1 & \text{, si } X_i \in B_j, \\
0 & \text{, si } X_i \notin B_j.
\end{aligned} \right.\]
Denote \(m_j\) por el centro de cada segmento. Esto implica que la definición del histograma asigna para cada \(x\) en el segmento \(B_j=\left[m_j-\frac{h}{2},m_j+\frac{h}{2} \right)\) la misma estimación para \(f\), \(\hat{f}_h(m_j)\).
Si \(x_0=0\), entonces los segmentos están dados por \(B_j = \left[ (j-1)h, jh \right],~~~ j \in \mathbb{Z}\).
Suponga que queremos estimar la densidad de un \(x \in B_j\). La estimación usando el histograma para estimar \(f(x)\) es \[\hat{f}_h(x)=\frac{1}{nh} \sum_{i=1}^n \sum_{j} I(X_i \in B_j) I(x \in B_j)=\frac{1}{nh} \sum_{i=1}^n I(X_i \in B_j)\]
\(\hat{f}_h(x)\) es sesgado para estimar \(f(x)\).
Calculemos la esperanza del estimador \(\hat{f}_h(x)\). \[E\left(\hat{f}_h(x)\right)=\frac{1}{nh}\sum_{i=1}^n E\left\lbrace I(X_i \in B_j) \right\rbrace=\frac{1}{nh} n E\left\lbrace I(X_i \in B_j) \right\rbrace\]
Note que \(I(X_i \in B_j)\) es una variable aleatoria definida como \[I(X_i \in B_j)= \begin{cases} 1, \text{ con probabilidad } \int_{(j-1)h}^{jh} f(u) du, \\
0,\text{ con probabilidad } 1-\int_{(j-1)h}^{jh} f(u) du\end{cases}\]
Entonces, es un ensayo de Bernoulli y su esperanza es: \[E\left\lbrace I(X_i \in B_j) \right\rbrace=\int_{(j-1)h}^{jh} f(u) du.\]
Finalmente, tenemos que \[E\left(\hat{f}_h(x)\right)=\frac{1}{nh} n E\left\lbrace I(X_i \in B_j) \right\rbrace=\frac{1}{h} \int_{(j-1)h}^{jh} f(u) du.\]
El sesgo es dado por \[B\left(\hat{f}_h(x)\right)=E\left(\hat{f}_h(x)\right)-f(x)= \frac{1}{h} \int_{(j-1)h}^{jh} f(u) du - f(x).\]
Usando aproximación de Taylor de \(f(x) - f(u)\) alrededor de \(m_j=\left(j-\frac{1}{2}\right) h\) de \(B_j\), tenemos \(f(x) - f(u) \approx f'(m_j)\left[m_j-x\right]\). Por lo tanto,
El sesgo es casi cero cuando \(x=m_j\), o sea en el punto medio de \(B_j\).
El sesgo depende de la pendiente de \(f\).
La variancia del estimador \(\hat{f}_h(x)\): \[Var\left(\hat{f}_h(x)\right)=Var \left\lbrace \frac{1}{nh}\sum_{i=1}^n I(X_i \in B_j) \right\rbrace =\frac{1}{n^2h^2} Var \left\lbrace \sum_{i=1}^n I(X_i \in B_j) \right\rbrace\]\[=\frac{1}{n^2h^2} \left[\int_{(j-1)h}^{jh} f(u) du\right] \left[1-\int_{(j-1)h}^{jh} f(u) du\right] \] Se puede mostrar que: \[Var\left(\hat{f}_h(x)\right) \approx \frac{1}{nh}f(x)\]
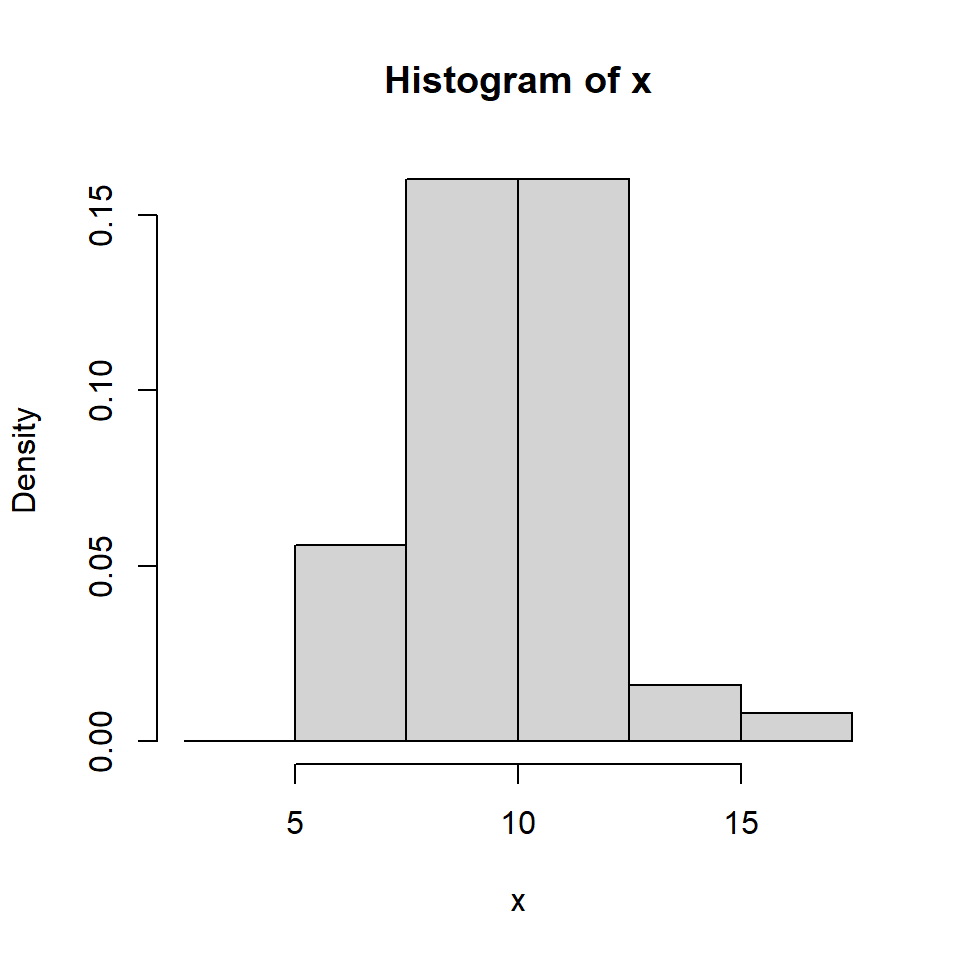
Note que la variancia del estimador decrece cuando \(nh\) crece, mientras que el sesgo del estimador decrece a cero si \(h\) decrece.
Recuerden que el error cuadrático medio es: \[ECM\left(\hat{f}_h(x)\right)= Var\left(\hat{f}_h(x)\right)+\left[B\left(\hat{f}_h(x)\right)\right]^2.\]
Para poder minimizar \(ECM\left(\hat{f}_h(x)\right)\) se debe encontrar un equilibrio de \(h\), pero esto sirve solamente para un \(x\) dado.
Existe el error cuadrático medio integrado (ECMI) definido como \[ECMI\left(\hat{f}_h(x)\right)=E\left\lbrace\int_{-\infty}^{\infty} \left[\hat{f}_h(x) - f(x) \right]^2 dx\right\rbrace\]\[=\int_{-\infty}^{\infty} E\left[\left(\hat{f}_h(x) - f(x) \right)^2 \right] dx=\int_{-\infty}^{\infty} ECM\left(\hat{f}_h(x)\right) dx.\]
Se puede comprobar que el óptimo ancho del segmento es: \[h_{opt} \sim n^{-1/3}.\]
Estimación de densidad Kernel
Idea básica del histograma para estimar \(f(x)\) es: \[\hat{f}_h(x) = \frac{\#\left\lbrace \text{observaciones que caen dentro del intervalo que contiene a }x \right\rbrace}{n \cdot (\text{ancho del intervalo})},\] donde el intervalo \(B_i\) está centrado en \(m_j\).
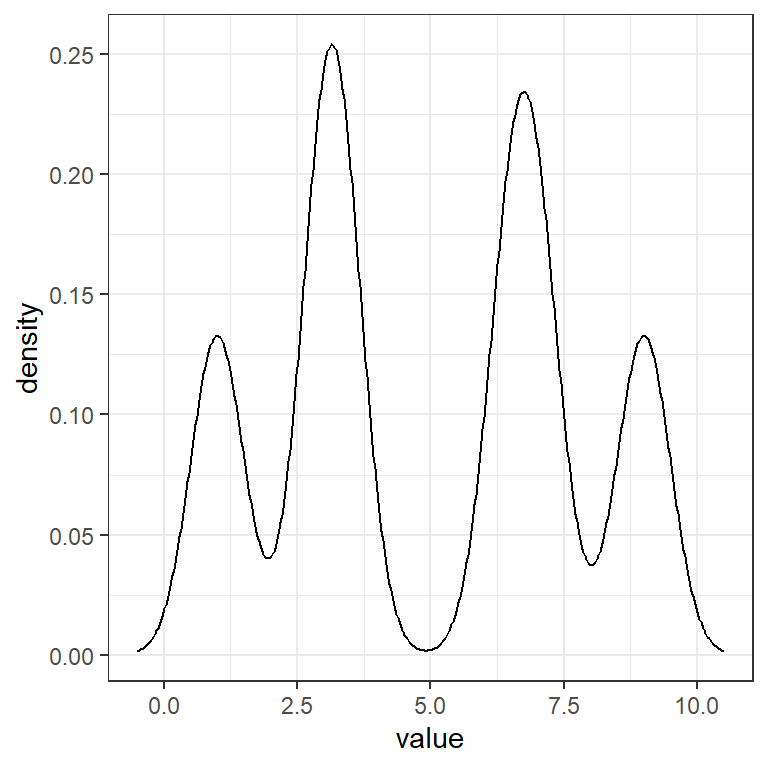
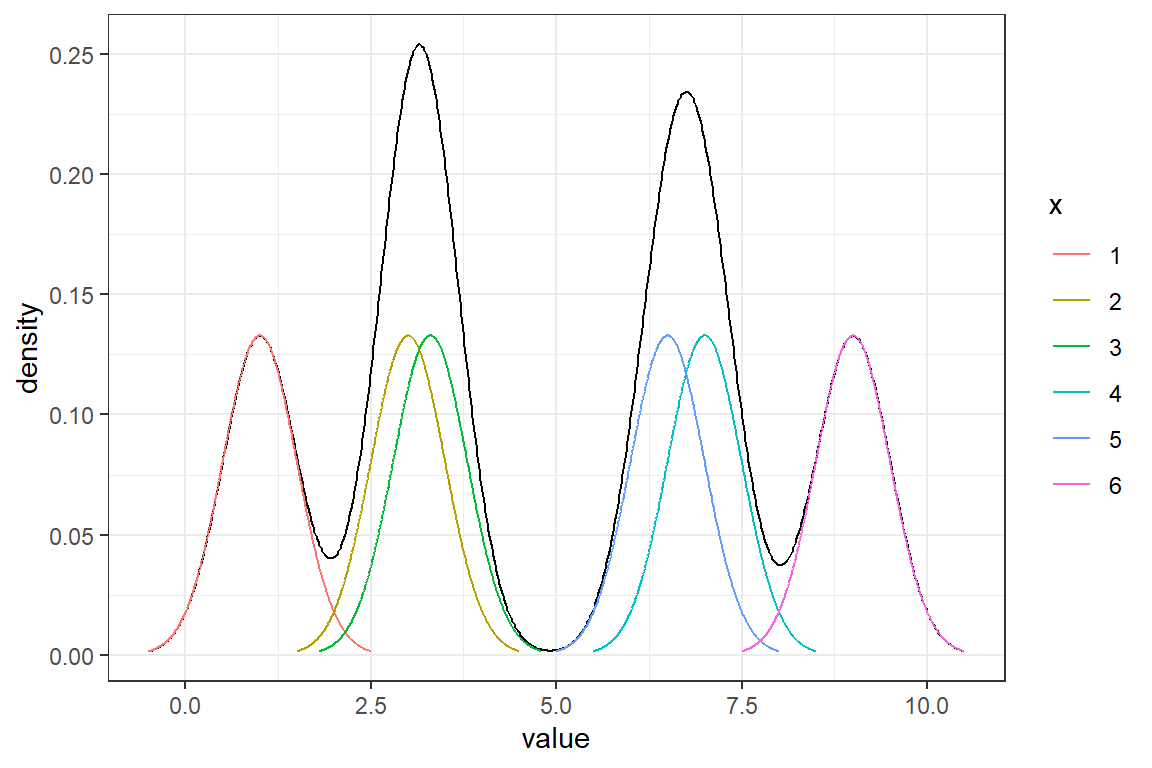
La idea de la estimación de densidad por kernel es ligeramente diferente:
\[\hat{f}_k(x) = \frac{\#\left\lbrace \text{observaciones que caen dentro del intervalo que está alrededor de }x \right\rbrace}{n \cdot (\text{ancho del intervalo})}.\]
Esto se puede reescribir como: \[\hat{f}_k(x) = \frac{1}{n \cdot 2h} \#\left\lbrace X_i \in [x-h,x+h)] \right\rbrace\]
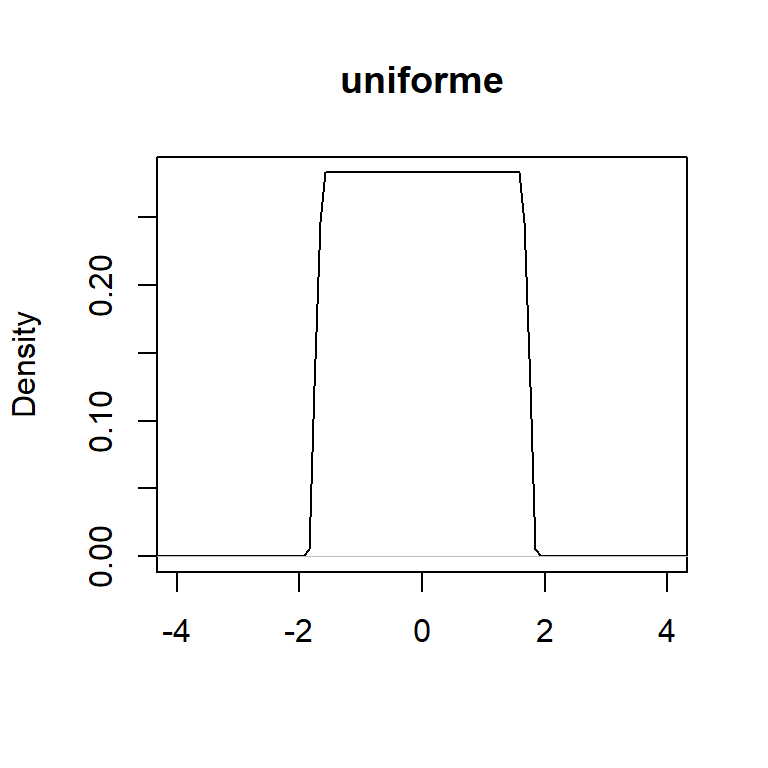
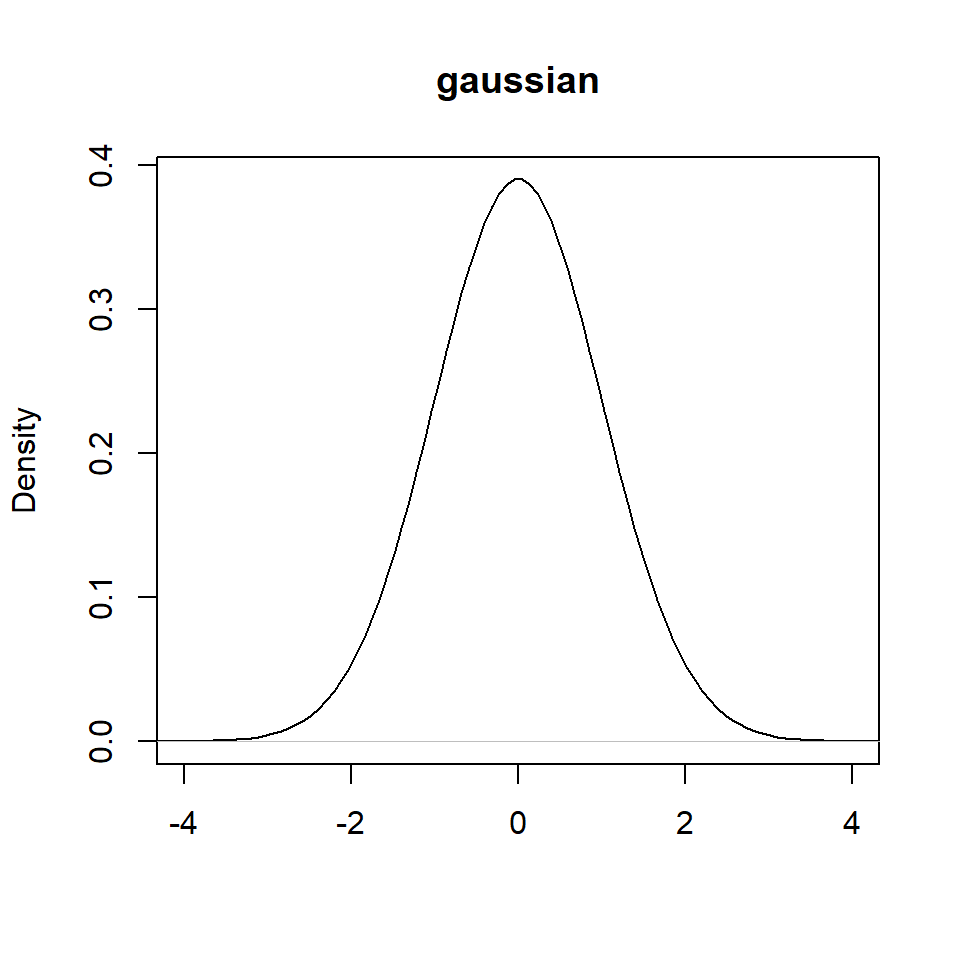
Si definimos la función kernel uniforme:
\[K(u)=\frac{1}{2} I(|u|\leq 1),\] donde \(u=(x-X_i)/h\).
Y otras como Epanechnikov, cudrática (biweight), triweight, coseno, etc.
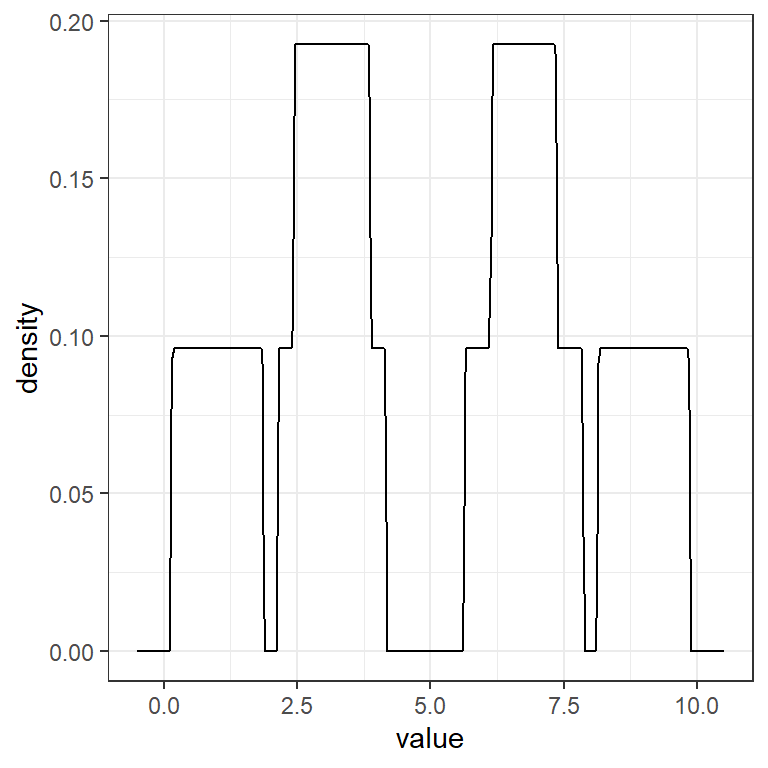
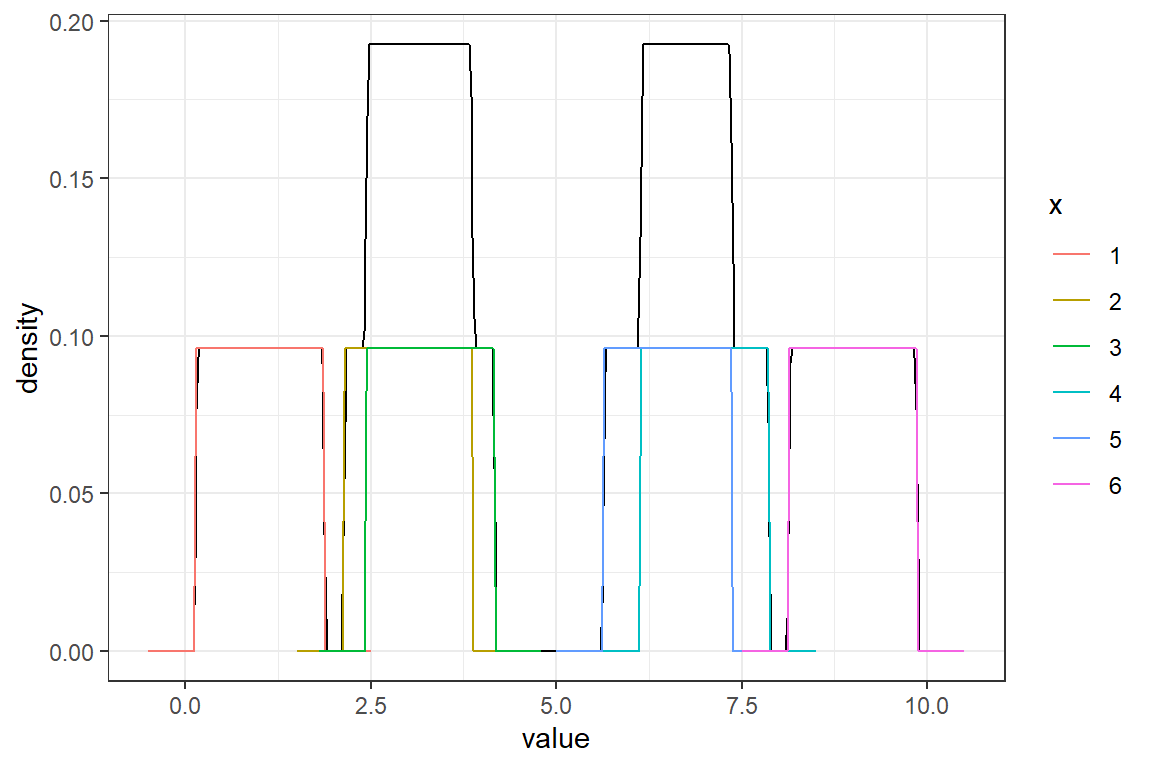
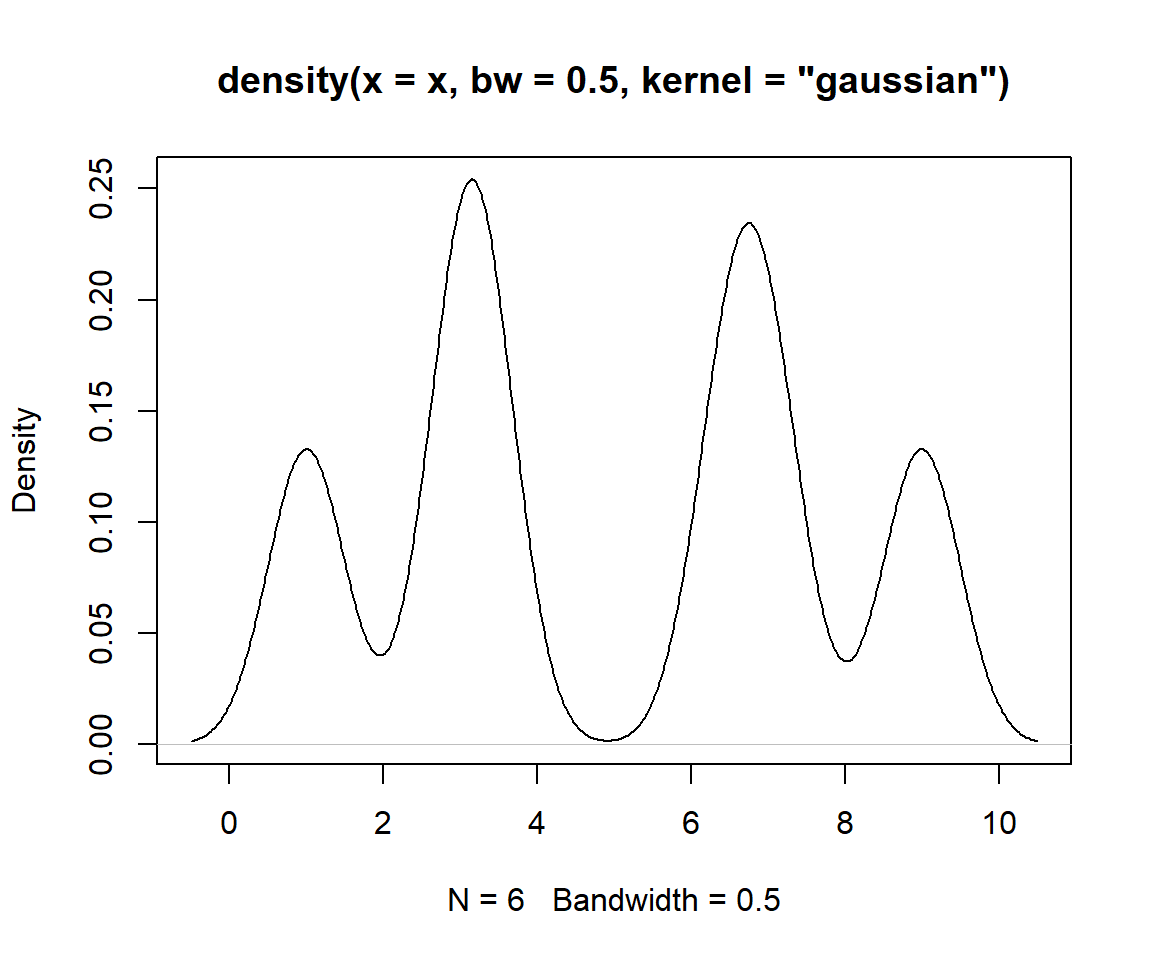
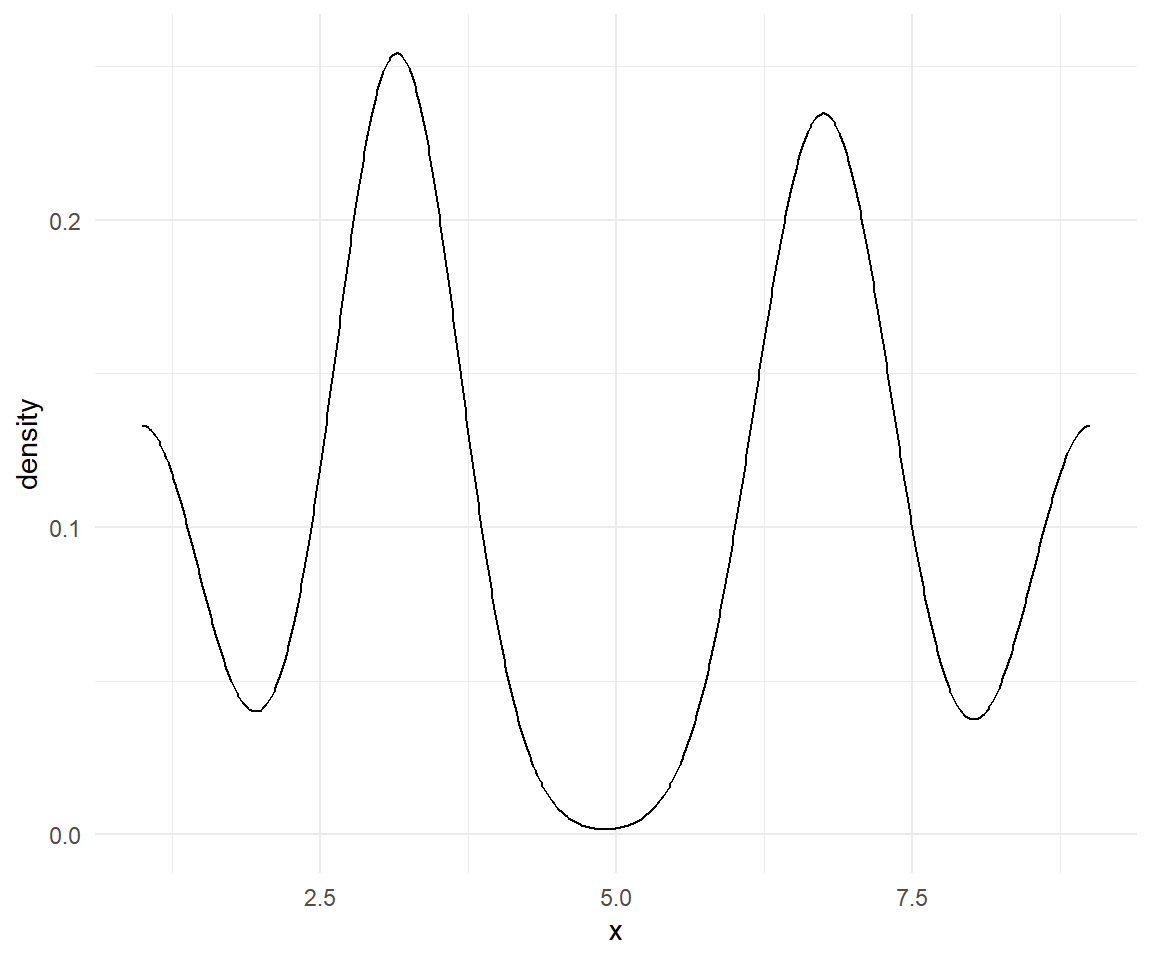
Ejemplo: Para una muestra de una población con distribución desconocida: \((1,3,3.3,7,6.5,9)\), estime la densidad usando el kernel gaussiano y \(h=0.5\).
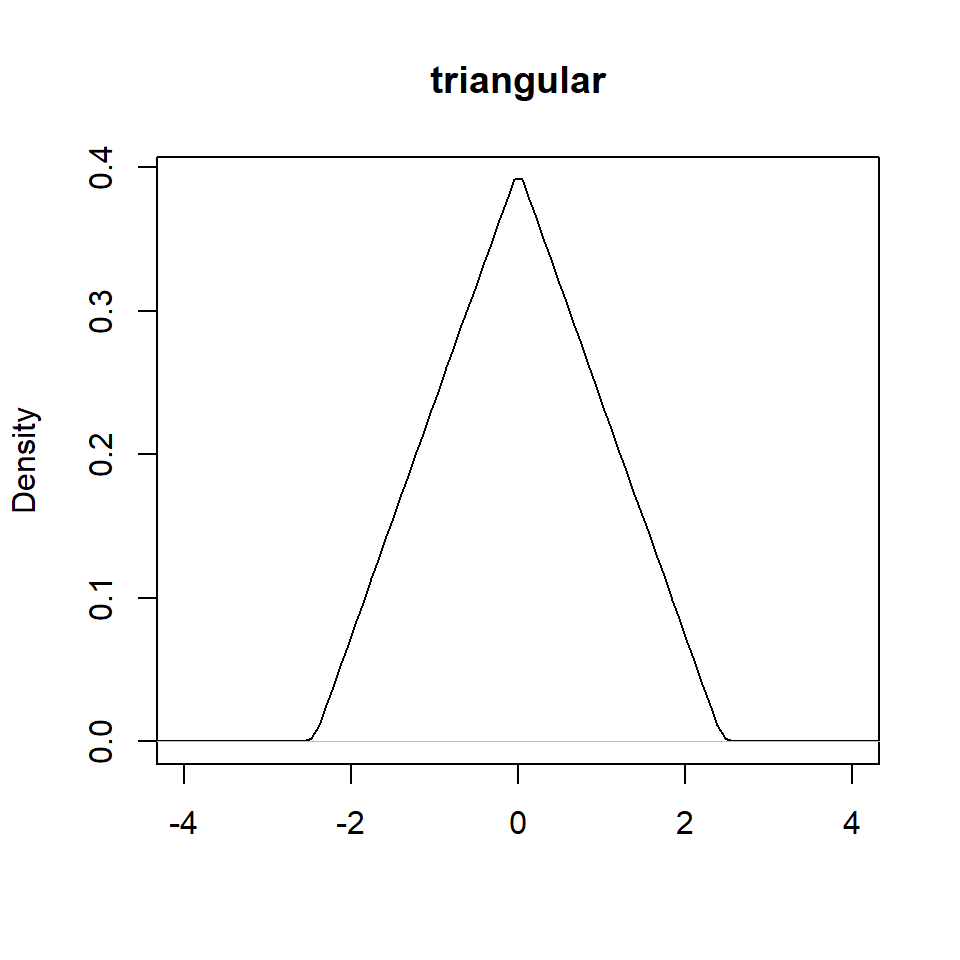
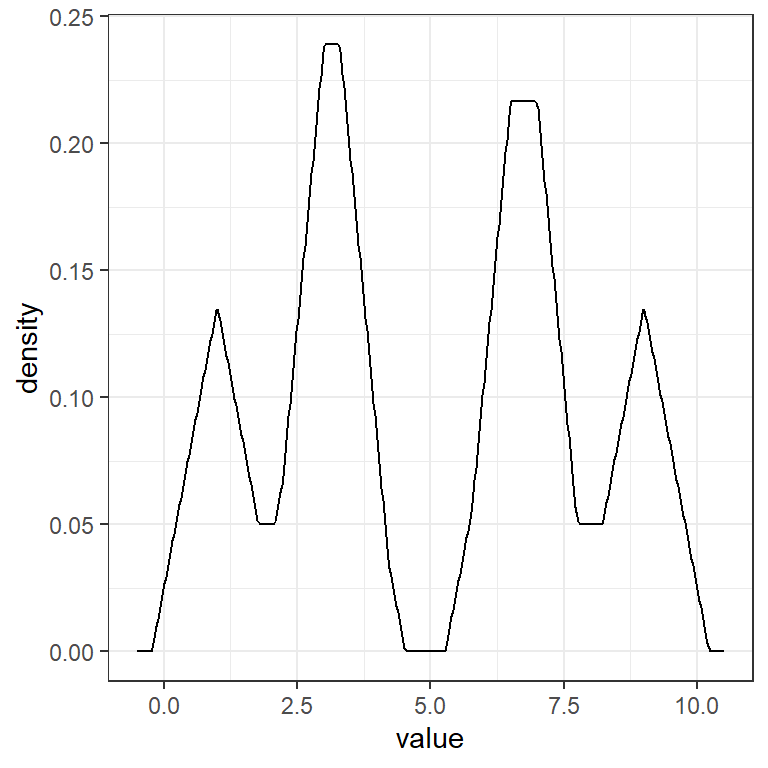
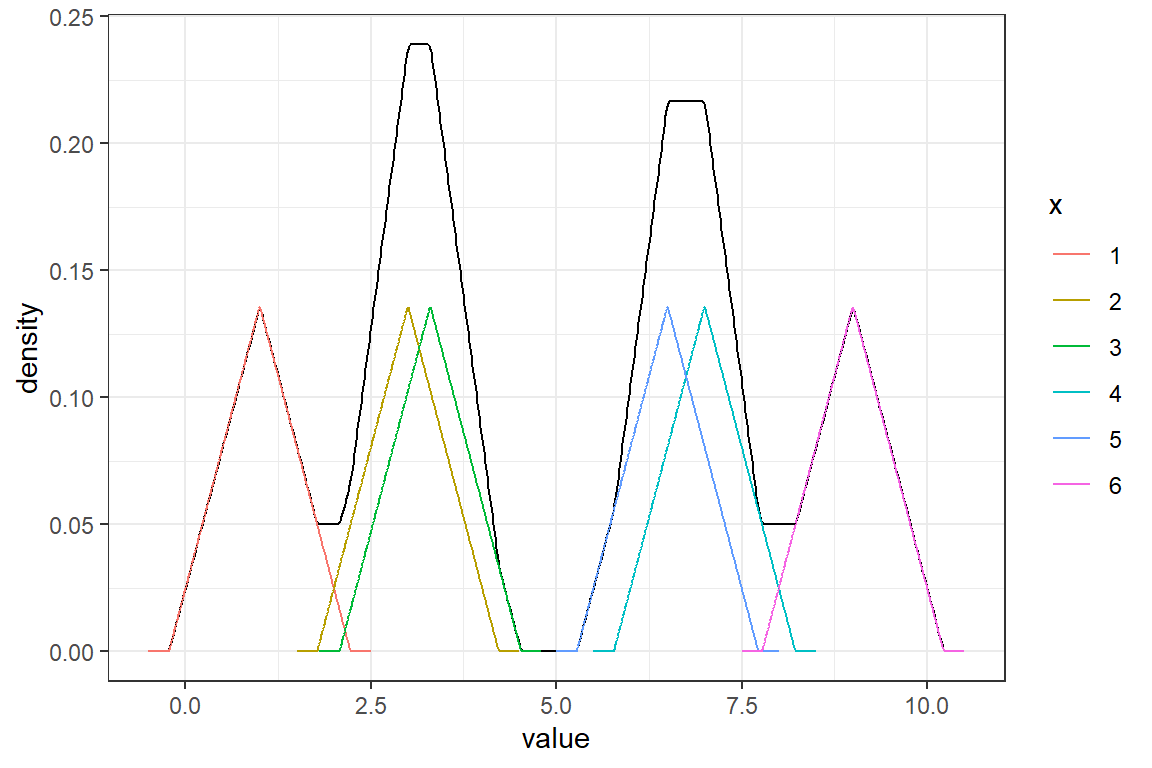
Ejemplo: Para una muestra de una población con distribución desconocida: \((1,3,3.3,7,6.5,9)\), estime la densidad usando el kernel triangular y \(h=0.5\).
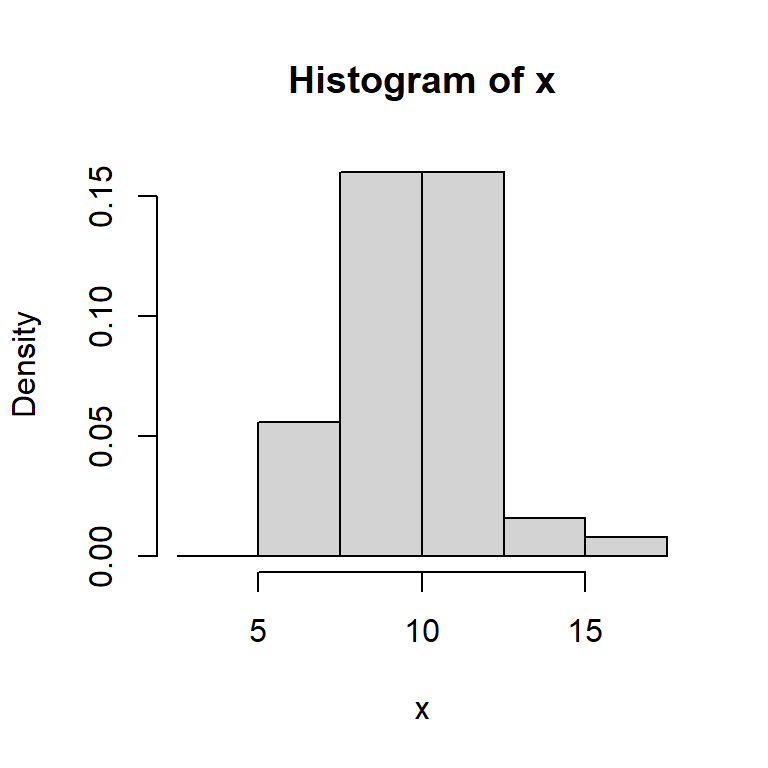
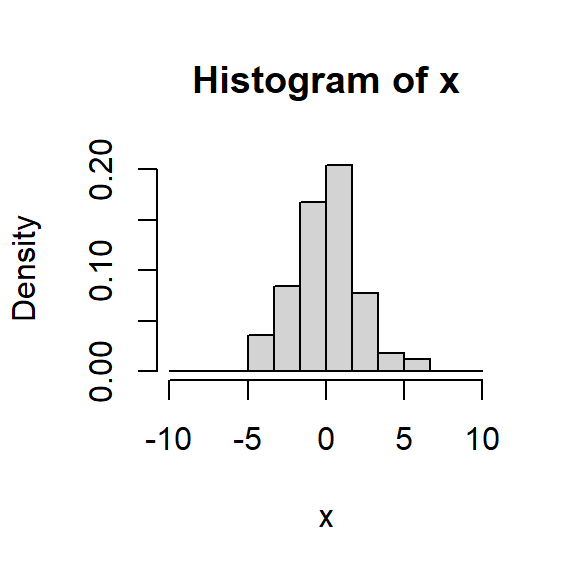
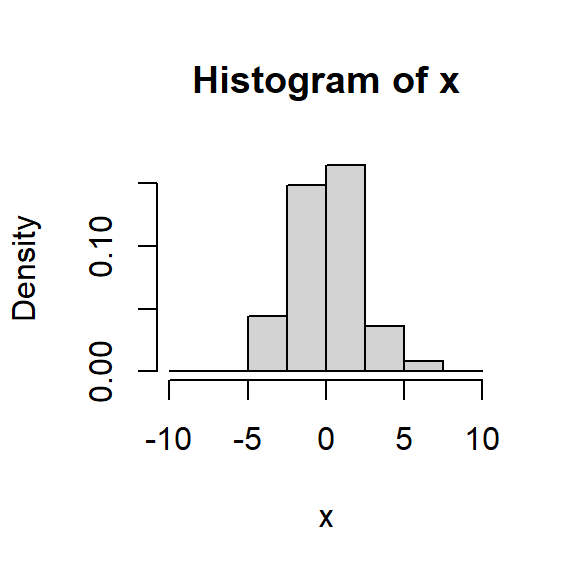
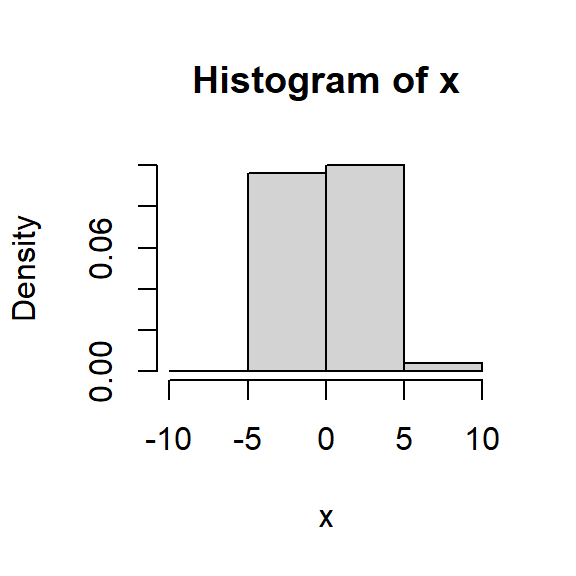
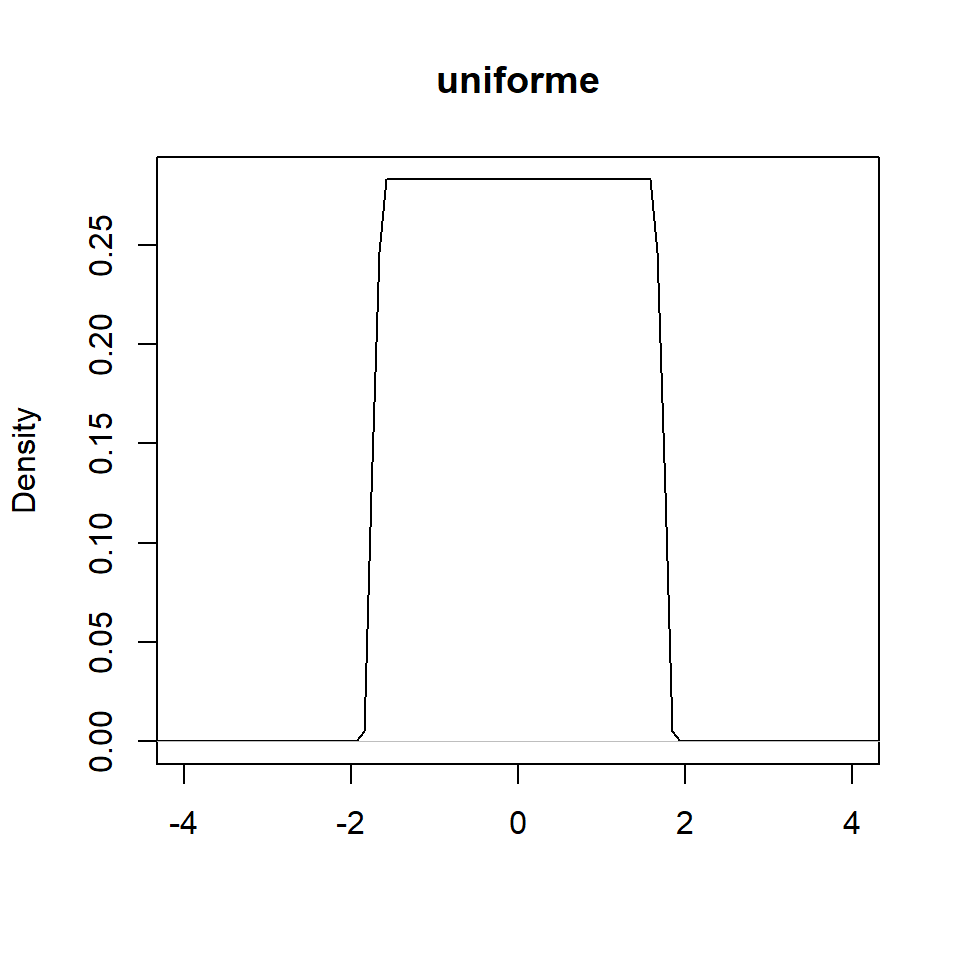
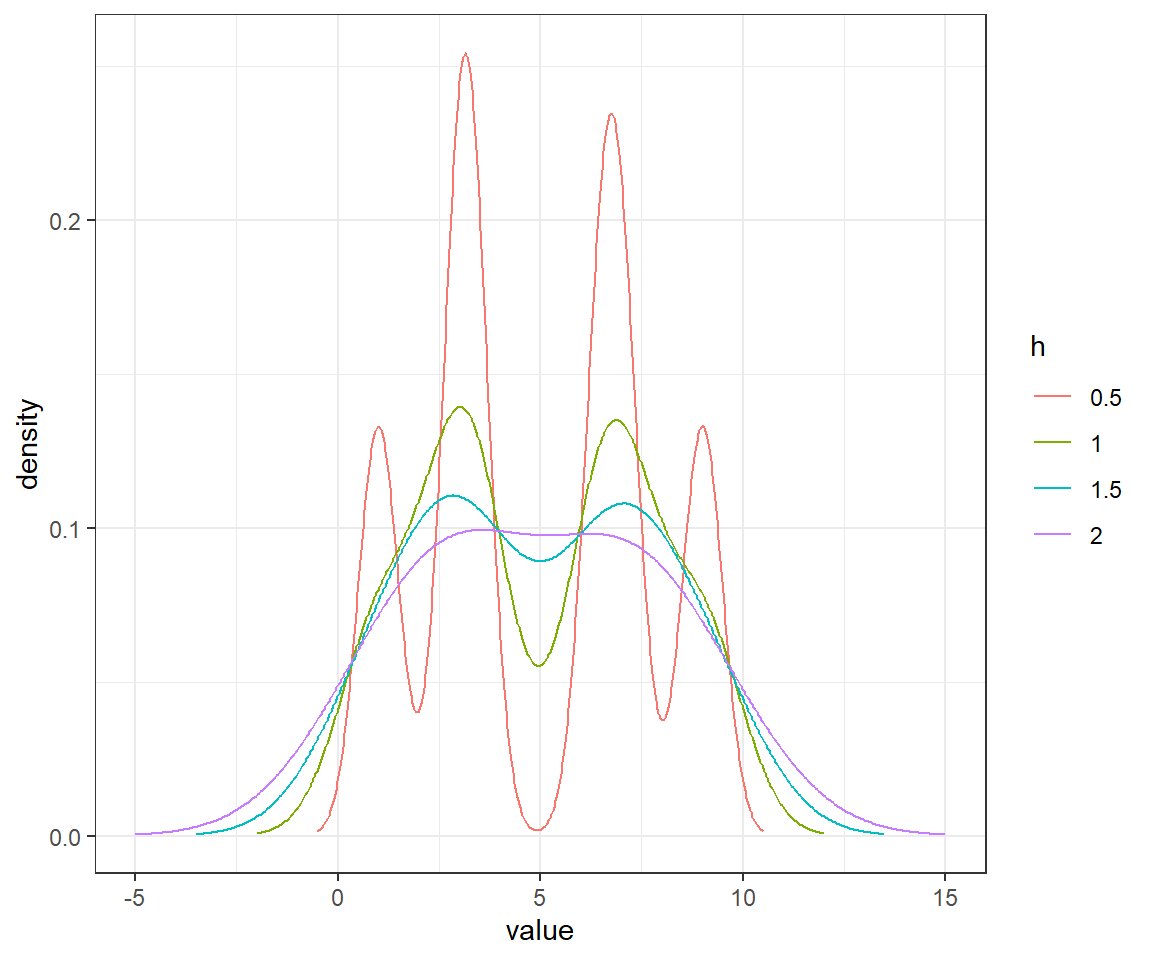
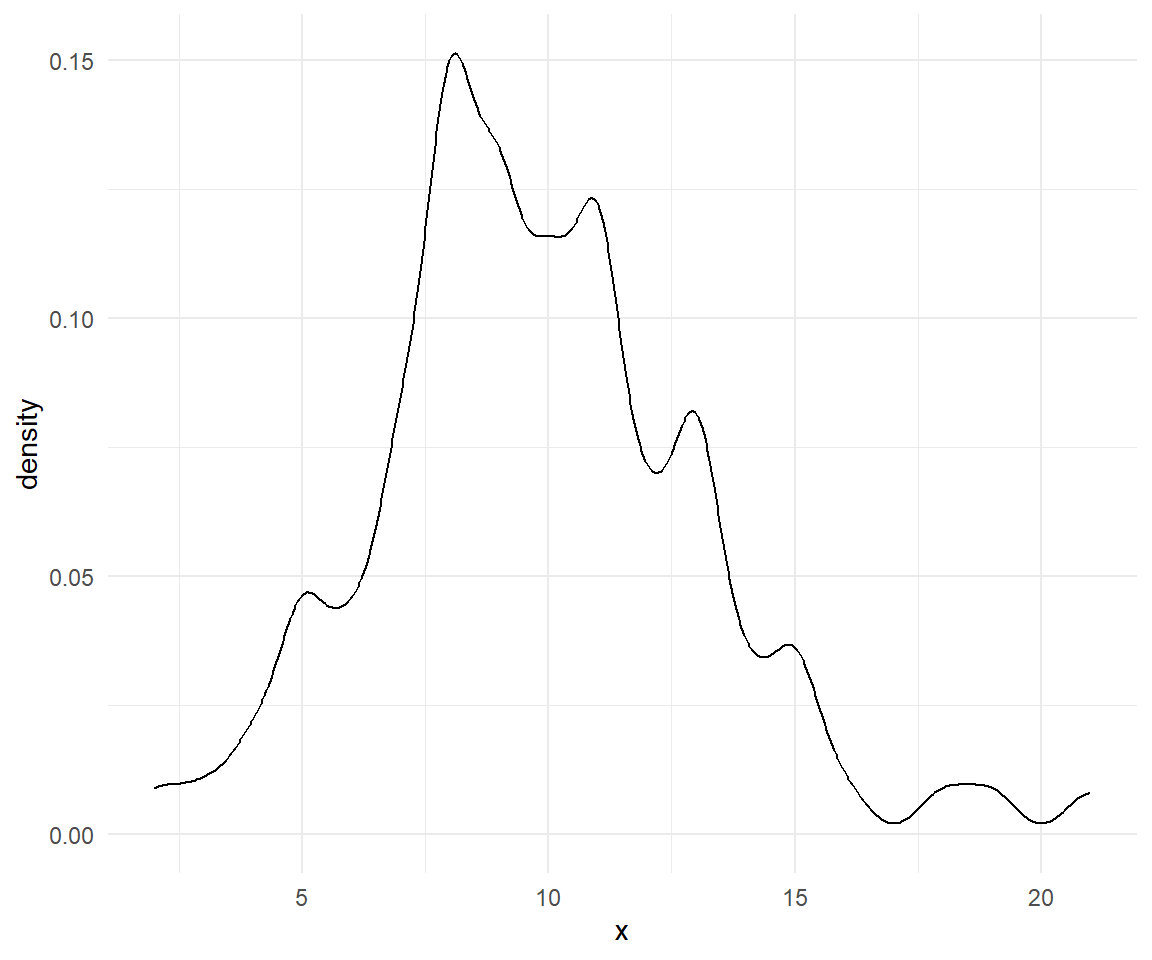
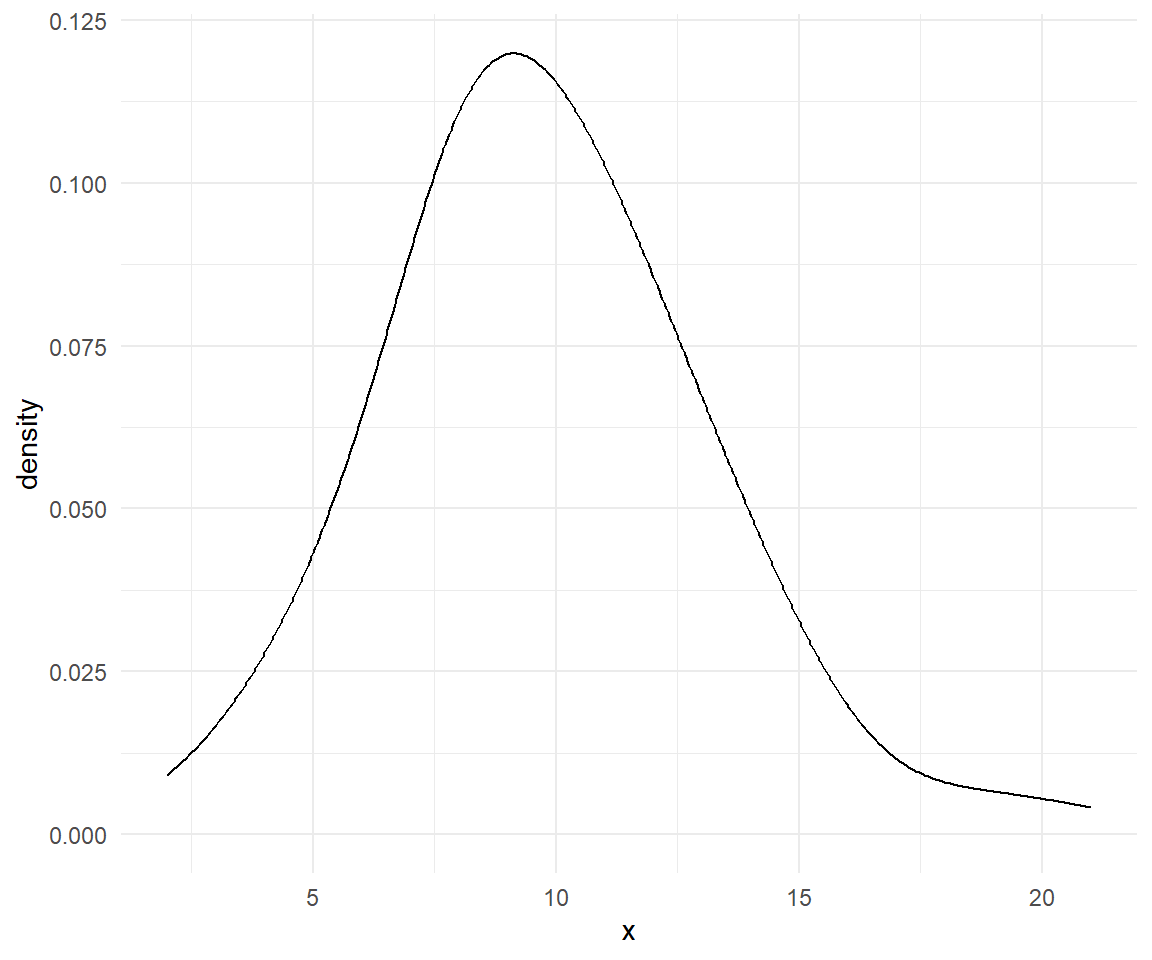
Variando \(h\)
Con \(h=0.5,1,1.5,2\), lo que hace es suavizar más o menos la densidad estimada.